
שלום,
כרגיל, אני מנסה לשפוך פה עוד רעיון שמסתובב לי בראש והייתי רוצה לבנות, אבל אין לי זמן לזה...
מה זה המחסן האוטומטי הזה?
כרגע במחסן שלי יש שורות של מדפים עם קופסאות (פחות או יותר אחידות) והייתי רוצה שבמקום שאסתובב עם עגלה בין המדפים, מערכת המחסן תביא לי את הקופסאות שצריך כדי להכין הזמנה, אני אקח מהם את המוצרים שצריך והמערכת תחזיר את הקופסה למקום.
איך הגעתי לזה בכלל?
האמת, אני כבר לא ממש זוכר, אבל הרעיון של מחסן אוטומטי יושב לי בראש כבר הרבה מאוד זמן, הרבה לפני שהתחלתי עם העסק של 4Project. יכול להיות שהיה לי איזה רעיון עסקי אחר שקשור לזה. לפני כשנתיים כשהעברתי את העסק מהבית למחסן חיצוני, היה די ברור שמערכת כזו יכולה להתאים לי מצויין. אפילו פתחתי שרשור בפורום makers בו שאלתי על בעיה מסויימת שהיתה לי בראש לטובת כיוון מימוש אחד, אבל בסוף גלשתי לכיוונים אחרים ודי התייצבתי על כיוון מסויים של מימוש המחסן, אותו אנסה לתאר בפוסטים של השרשור הזה.
במה מחסן האוטומטי יכול לעזור לי?
ניצול מקום לגובה - במחסן הקודם גובה התקרה היה כ-2.80 מטר, אז קניתי מדפים מודולריים שאפשר להגיע איתם עד 2.5 מטר שבסידור שיש לי כרגע אפשר להכניס 13 קומות של מדפים. בפועל יש לי רק 10 קומות כי מעל זה כבר אי אפשר להגיע בצורה נוחה כדי להוציא את הקופסה. כך שאם המערכת תוכל לנצל את כל הגובה, ארוויח 30% מקום אחסון נוסף! במחסן החדש שעברתי אליו גובה התקרה הוא 4-5 מטר, אבל אני לא מכוון לשם ומעדיף להשתמש במדפים שיש לי (עד 2.5 מטר).
ניצול שטח המחסן - העסק גדל ובאיזה שהוא שלב יצטרכו להסתובב במחסן יותר מאדם אחד. כרגע רוחב המעבר בין המדפים מספיק כדי שאדם אחד יעבור בם עם העגלה, שני אנשים לא יכולים לעבור גם אם ממש ירצו. המעבר כרגע הוא 70 ס"מ. כדי ששני אנשים יעבור, צריך להשאיר לפחות 1.5 מטר, מה שאומר כמעט להכפיל את השטח של המחסן. שטח גדול יותר = מחיר שכירות גבוה יותר. וזה לא גידול הדרגתי, זה קפיצה פי 2! עם מערכת אוטומטית
אפשר יהיה לצמצם את המעברים למינימום הדרוש, שזה כנראה פחות מ-70 ס"מ שיש לי כרגע, אגיע לנקודה הזו בהמשך ההסברים. וכדי שיותר מאדם אחד יוכל להכין את ההזמנות, צריך רק להוסיף עמדות אליהן יגיעו הקופסאות, שהמקום שצריך בשביל זה יהיה הרבה יותר קטן מלהכפיל את שטח המחסן כולו.
יעול זמן העבודה - נקודה הזו די בעייתית להוכחה כי עד שלא אמדוד בפועל כמה מהר המערכת האוטומטית תוכל להביא לי את כל הקופסאות, לא אוכל להגיד אם היא יעילה יותר מהסתובבות של אדם עם עגלה. אבל גם בלי המדידות המדוייקות, אחרי מעבר למחסן גדול יותר אני רואה היטב איך אורך המחסן משפיע על הזמן וזה עוד לפני שמלאתי את המעבר השני של המדפים, כלומר בלי שאני צריך לעשות סיבוב שלם כדי להגיע לקופסה במעבר השני. ברור לי שהמחסן האוטומטי לא יעבוד מביהורת האור, הזמנים יהיו כנראה כמו במדפסות לייזר, זמן לדף הראשון (עד שהתוף מתחמם והתמונה מעובדת) וזמן לכל דף הבא, במקרה של המחסן, עד שהקופסה הראשונה תגיע ואחריה זמן להחלפת הקופסה, אני מקווה שעד שהמשתמש יטפל בקופסה הראשונה, ההבאות בתור כבר יחכו לו ולא להפך. בכל מקרה, הכל ממוחשב, אז המערכת תוכל להכין את כל הקופסאות שצריך להזמנה מסויימת, ואפילו להזמנה הבאה.
הפחתה של טעויות - פה אין וויכוח. המערכת לא אמורה לטעות ולהביא קופסה לא נכונה. לקראת סוך היום אחרי הכנה של די הרבה הזמנות העניים כבר לא ממש מבדילות בין מספרים כמו 6 ו-8 או אחרי הרבה הסתובבויות קל מאוד לאבד את הכיוון ולקחת קופסה מעמודה 3 ולא 4 וכך לשלוח למישהו מוצר שונה ממה שהוזמן. זה לא קורה הרבה, אבל קורה. הגישה האוטומטית אמורה להפחית כמעט ל-0 מקרים כאלה.
הייתי רוצה לבנות: מחסן אוטומטי
הייתי רוצה לבנות: מחסן אוטומטי
www.4project.co.il
כל הרכיבים לפרוייקט שלכם
כל הרכיבים לפרוייקט שלכם
Re: הייתי רוצה לבנות: מחסן אוטומטי
אז לקחתי לי את הזמן הפנוי שאין לי והתחלתי לצייר (למדל) את המדפים ואת הקופסאות במערכת OnShape המצויינת. גם כדי שאפשר יהיה להסביר למה אני מתכוון, גם כדי להתנסות במערכת הזו וגם כדי לתכנן את הכל בצורה מסודרת. בדרך כלל אני מתכנן את הכל בראש, אבל בגלל שמדובר בפרוייקט יחסית גדול ויקר, כל טעות יכולה לעלות די הרבה...
מערכת OnShape מאפשרת לשתף את הפרוייקטים שמוגדרים כ-Public, לכן תוכלו לראות את התכנון בתלת מימד בקישור זה.
אשתדל להוסיף גם כמה תמונות פה ושם כדי ללוות את ההסברים שלי.
אז מה יש לנו?
מדפים... כרגע 2 מעברים של 7 עמודות משני צידי המעבר:
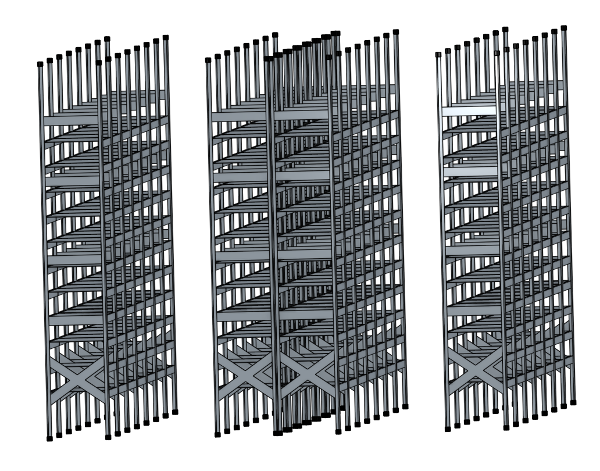
זה רק נראה כזה צפוף בתמונה, למעשה המדפים הם באורך 105 ס"מ:
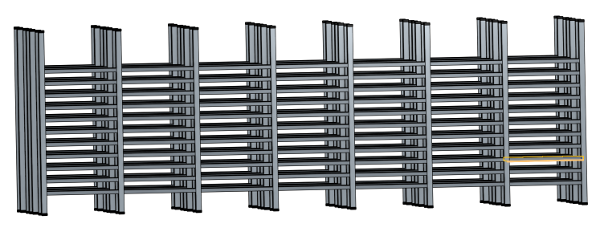
יש 10 קומות של מדפים בכל עמודה וכמו שאפשר לראות, יש מקום ל-3 שורות נוספות שקשה להגיע אליהם בלי סולם/מדרגה.
עומק כל מדף הוא 40 ס"מ.
מרווח בין המדפים בצעבר הוא 70 ס"מ וזה מספיק לי כדי לעבור עם העגלה ולעבוד שם בצורה נוחה יחסית.
מן הסתם אפשר לצמצם את המעבר לאורך הקופסה המקסימלי (40 ס"מ) פלוס מה שצריך לטובת המערכת, אבל אחת הדרישות שאפרט בהמשך זה שאפשר יהיה לעבוד ידנית במקרה של תקלה משביתה, כך שהמרווח הזה ישאר בינתיים 70 ס"מ עד שהמערכת תוכיח את עצמה.
הקומה העליונה (ה-11) משמשת אותי כרגע לאחסון של דברים ולא לקופסאות שהיית רוצה לטפל בהם ע"י המערכת.
הרווח בין הרצפה למדף התחתון מאפשר לי להכניס ארגזי פלסיק גדולים שגם הם לא אמורים לקחת חלק במערכת האוטומטית, אבל המרווח הזה יכול להיות מנוצל ע"י המסוע שיביא את הקופסות, גם על זה בהמשך.
הקופסאות עצמן נראות כך:
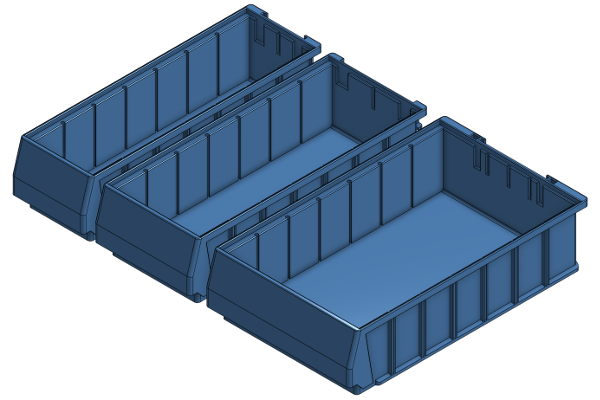
יש 3 גדלים ברוחב: 12 ס"מ, 16 ס"מ ו-24 ס"מ. האורך זהה לאורך המדף: 40 ס"מ והגובה שלהן הוא כ-10 ס"מ.
שלושת הגדלים מסתדרים מצויין במדפים שבחרתי, כאמור האורך של מדף הוא 105 ס"מ, יש כ-3.5 ס"מ מכל צד שמוסתרות ע"י המסגרת של הרגל, כך שנשארים 98 ס"מ פנויים לרוחב של המדף. הקופסאות נכנסות לרוחב זה בצורה של 8 קופסאות קטנות (8*12=96), 6 קופסאות בינוניות (6*16=96) או 4 קופסאות גדולות (4*24=96).
מקופסאות יש מקום לחוצצים שיכולים לחלק את האחסון ל-7 תאים. עם זה המשתמש יצטרך להתמודד לבד, אבל המערכת תוכל להצביע לו עם לייזר על התא שצריך לקחת ממנו את המוצר, כך שזה יעזור להפחית את הטעויות בהכנת ההזמנות.
בפוסט הבא אפרט את הדרישות שיש לי מהמערכת...
מערכת OnShape מאפשרת לשתף את הפרוייקטים שמוגדרים כ-Public, לכן תוכלו לראות את התכנון בתלת מימד בקישור זה.
אשתדל להוסיף גם כמה תמונות פה ושם כדי ללוות את ההסברים שלי.
אז מה יש לנו?
מדפים... כרגע 2 מעברים של 7 עמודות משני צידי המעבר:
זה רק נראה כזה צפוף בתמונה, למעשה המדפים הם באורך 105 ס"מ:
יש 10 קומות של מדפים בכל עמודה וכמו שאפשר לראות, יש מקום ל-3 שורות נוספות שקשה להגיע אליהם בלי סולם/מדרגה.
עומק כל מדף הוא 40 ס"מ.
מרווח בין המדפים בצעבר הוא 70 ס"מ וזה מספיק לי כדי לעבור עם העגלה ולעבוד שם בצורה נוחה יחסית.
מן הסתם אפשר לצמצם את המעבר לאורך הקופסה המקסימלי (40 ס"מ) פלוס מה שצריך לטובת המערכת, אבל אחת הדרישות שאפרט בהמשך זה שאפשר יהיה לעבוד ידנית במקרה של תקלה משביתה, כך שהמרווח הזה ישאר בינתיים 70 ס"מ עד שהמערכת תוכיח את עצמה.
הקומה העליונה (ה-11) משמשת אותי כרגע לאחסון של דברים ולא לקופסאות שהיית רוצה לטפל בהם ע"י המערכת.
הרווח בין הרצפה למדף התחתון מאפשר לי להכניס ארגזי פלסיק גדולים שגם הם לא אמורים לקחת חלק במערכת האוטומטית, אבל המרווח הזה יכול להיות מנוצל ע"י המסוע שיביא את הקופסות, גם על זה בהמשך.
הקופסאות עצמן נראות כך:
יש 3 גדלים ברוחב: 12 ס"מ, 16 ס"מ ו-24 ס"מ. האורך זהה לאורך המדף: 40 ס"מ והגובה שלהן הוא כ-10 ס"מ.
שלושת הגדלים מסתדרים מצויין במדפים שבחרתי, כאמור האורך של מדף הוא 105 ס"מ, יש כ-3.5 ס"מ מכל צד שמוסתרות ע"י המסגרת של הרגל, כך שנשארים 98 ס"מ פנויים לרוחב של המדף. הקופסאות נכנסות לרוחב זה בצורה של 8 קופסאות קטנות (8*12=96), 6 קופסאות בינוניות (6*16=96) או 4 קופסאות גדולות (4*24=96).
מקופסאות יש מקום לחוצצים שיכולים לחלק את האחסון ל-7 תאים. עם זה המשתמש יצטרך להתמודד לבד, אבל המערכת תוכל להצביע לו עם לייזר על התא שצריך לקחת ממנו את המוצר, כך שזה יעזור להפחית את הטעויות בהכנת ההזמנות.
בפוסט הבא אפרט את הדרישות שיש לי מהמערכת...
www.4project.co.il
כל הרכיבים לפרוייקט שלכם
כל הרכיבים לפרוייקט שלכם
Re: הייתי רוצה לבנות: מחסן אוטומטי
טוב... הדרישות...
חשבתי על זה קצת היום, מה לרשום כדי שהדרישות יהיו באמת Requirements ולא חלק מה-Design.
צריך לתאר את בדרישות כ-Use cases ולא כתאור של איך המערכת צריכה לפעול (שזה הרבה יותר קל לי כמישהו עם ראש של מהנדס).
אז ככה... הדבר בסיסי והברור:
המערכת צריכה להביא הקופסה מהמדפים למפעיל ובחזרה כשהמפעל מסיים לעבוד איתה.
איזו קופסה? בהתאם למה שמערכת האתר תחליט - אני לא רוצה להכנס לזה כרגע, אבל בגדול יש 3 סוגי פעולה שאני יכול לחשוב עליהם כרגע:
1. ליקוט הזמנות - הקופסאות מגיעות בהתאם למוצרים שבהזמנה
2. מילוי המחסן - הקופסאות מגיעות בהתאם למוצרים שבמשלוח שהגיע מהספק, גם להם יש סוג של הזמנת ספק במערכת
3. בקשה מפורשת של המפעיל - כדי לראות, לבדוק, להחזיר משהו וכו'
איך הקופסאות יגיעו - זה יהיה חלק מה-Design, אבל יש לא מעט דרישות שקשה לי כרגע להגדיר במדוייק, כמו כמה זמן המתנה אני מוכן שיהיה, אבל אפשר לסכם את זה בצורה כזו:
הזמן לא צריך לגדול משמעותית עם הגדלת והרחבת המחסן.
וגם המערכת צריכה להיות מודולרית מספיק כדי שאפשר יהיה להוסיף רכיבים לתוכה כדי לשפר את הביצועים עד כמה שאפשר.
למשל: שאפשר יהיה להוסיף עוד עמדת מפעיל בלי שצריך לתכנן את הכל מחדש.
בהתחלה רציתי לכתוב שלא יהיו צוורי בקבוק במערכת, אבל תמיד יהיה איזה חלק מהמערכת שיעבוד איטי יותר מהאחרים והוא זה שיהיה צוור הבקבוב, אז אגדיר את זה כך: האיטיות של רכיב שהוא צוור הבקבוק של המערכת צריכה להיות מהירה מספיק כדי לא לעכב את העבודה השוטפת של המפעיל.
במקרים בהם צריך לקבל מספר קופסאות כדי להכין הזמנה, מקובל עלי שיהיה זמן המתנה התחלתי עד שקופסה הראשונה תגיע, אבל אחרי זה הקופסאות צריכות לזרום למפעיל אחת אחרי השניה בצורה הכי מהירה שאפשר.
באותה הצורה אפשר יהיה להפעיל גם את צורת העבודה של מילוי המחסן, המערכת יודעת אילו מוצרים אמורים להגיע מהספק, אז היא תוכל להביא את הקופסאות הרלוונטיות כדי שיהיו מוכנות. או שהמפעיל יסמן כמה מוצרים שהוא רואה מול העיניים והמערכת תביא את הקופסאות האלה.
אגלוש רגע למימוש כדי להסביר את הסוגיה של "הזמן לא צריך לגדול עם הגדלת והרחבת המחסן"...
נניח שיש שורה אחת של מדפים. בשורה יש 3 עמודות של המדפים. יש סוג של עגורן שנוסע בין המדפים ומביא את הקופסאות. בממוצע לוקח לו X זמן להביא קופסא.
באיזה שהוא שלב צריך להרחיב את השורה ל-6 עמודות.
אם עכשיו נותנים לעגורן הזה לטפל במחסן הכפול, אז כנראה שהזמן יגדל למשהו שהוא קרוב ל-2X וזה משהו שאני לא רוצה שיקרה.
צריך למצוא פתרון שיאפשר להגדיל גם את אורך השורות, להוסיף שורות, להוסיף עמדות עבודה ואולי בעתיד גם לחבר כמה חללי מחסנים נפרדים וכל זה שלא יבוא יותר מדי על חשבון הזמן שיקח לקופסאות להגיע למפעיל.
האא.. עוד דרישה חשובה ששכחתי: שאפשר יהיה להחזיר את המחסן לעבודה ידנית תוך זמן סביר (נניח שעה). שלא יהיה מצב שהמחסן מושבת לשבוע בגלל איזו תקלה ותקלות תמיד יהיו, במיוחד בהתחלה...
חשבתי על זה קצת היום, מה לרשום כדי שהדרישות יהיו באמת Requirements ולא חלק מה-Design.
צריך לתאר את בדרישות כ-Use cases ולא כתאור של איך המערכת צריכה לפעול (שזה הרבה יותר קל לי כמישהו עם ראש של מהנדס).
אז ככה... הדבר בסיסי והברור:
המערכת צריכה להביא הקופסה מהמדפים למפעיל ובחזרה כשהמפעל מסיים לעבוד איתה.
איזו קופסה? בהתאם למה שמערכת האתר תחליט - אני לא רוצה להכנס לזה כרגע, אבל בגדול יש 3 סוגי פעולה שאני יכול לחשוב עליהם כרגע:
1. ליקוט הזמנות - הקופסאות מגיעות בהתאם למוצרים שבהזמנה
2. מילוי המחסן - הקופסאות מגיעות בהתאם למוצרים שבמשלוח שהגיע מהספק, גם להם יש סוג של הזמנת ספק במערכת
3. בקשה מפורשת של המפעיל - כדי לראות, לבדוק, להחזיר משהו וכו'
איך הקופסאות יגיעו - זה יהיה חלק מה-Design, אבל יש לא מעט דרישות שקשה לי כרגע להגדיר במדוייק, כמו כמה זמן המתנה אני מוכן שיהיה, אבל אפשר לסכם את זה בצורה כזו:
הזמן לא צריך לגדול משמעותית עם הגדלת והרחבת המחסן.
וגם המערכת צריכה להיות מודולרית מספיק כדי שאפשר יהיה להוסיף רכיבים לתוכה כדי לשפר את הביצועים עד כמה שאפשר.
למשל: שאפשר יהיה להוסיף עוד עמדת מפעיל בלי שצריך לתכנן את הכל מחדש.
בהתחלה רציתי לכתוב שלא יהיו צוורי בקבוק במערכת, אבל תמיד יהיה איזה חלק מהמערכת שיעבוד איטי יותר מהאחרים והוא זה שיהיה צוור הבקבוב, אז אגדיר את זה כך: האיטיות של רכיב שהוא צוור הבקבוק של המערכת צריכה להיות מהירה מספיק כדי לא לעכב את העבודה השוטפת של המפעיל.
במקרים בהם צריך לקבל מספר קופסאות כדי להכין הזמנה, מקובל עלי שיהיה זמן המתנה התחלתי עד שקופסה הראשונה תגיע, אבל אחרי זה הקופסאות צריכות לזרום למפעיל אחת אחרי השניה בצורה הכי מהירה שאפשר.
באותה הצורה אפשר יהיה להפעיל גם את צורת העבודה של מילוי המחסן, המערכת יודעת אילו מוצרים אמורים להגיע מהספק, אז היא תוכל להביא את הקופסאות הרלוונטיות כדי שיהיו מוכנות. או שהמפעיל יסמן כמה מוצרים שהוא רואה מול העיניים והמערכת תביא את הקופסאות האלה.
אגלוש רגע למימוש כדי להסביר את הסוגיה של "הזמן לא צריך לגדול עם הגדלת והרחבת המחסן"...
נניח שיש שורה אחת של מדפים. בשורה יש 3 עמודות של המדפים. יש סוג של עגורן שנוסע בין המדפים ומביא את הקופסאות. בממוצע לוקח לו X זמן להביא קופסא.
באיזה שהוא שלב צריך להרחיב את השורה ל-6 עמודות.
אם עכשיו נותנים לעגורן הזה לטפל במחסן הכפול, אז כנראה שהזמן יגדל למשהו שהוא קרוב ל-2X וזה משהו שאני לא רוצה שיקרה.
צריך למצוא פתרון שיאפשר להגדיל גם את אורך השורות, להוסיף שורות, להוסיף עמדות עבודה ואולי בעתיד גם לחבר כמה חללי מחסנים נפרדים וכל זה שלא יבוא יותר מדי על חשבון הזמן שיקח לקופסאות להגיע למפעיל.
האא.. עוד דרישה חשובה ששכחתי: שאפשר יהיה להחזיר את המחסן לעבודה ידנית תוך זמן סביר (נניח שעה). שלא יהיה מצב שהמחסן מושבת לשבוע בגלל איזו תקלה ותקלות תמיד יהיו, במיוחד בהתחלה...
www.4project.co.il
כל הרכיבים לפרוייקט שלכם
כל הרכיבים לפרוייקט שלכם
Re: הייתי רוצה לבנות: מחסן אוטומטי
בפוסט הזה אנסה לסכם את תהליך המחשבות שהיו לי לגבי אופן המימוש של המערכת.
הדגש הוא יותר למבנה המכני כי זה החלק בגדול ביותר לדעתי ומשהו שלא יהיה קל לשנות. התוכנה זה תוכנה, אם משהו לא מסתדר תמיד אפשר להוסיף, לתקן ולסדר.
אז נחזור לדוגמא של האגורן שנוסע במסדרון של מדפים, משני הצדדים יש מדפים בגבהים שונים, העגורן נוסע לאורך המסדרון, יכול לעלות ולרדת כדי להגיע לקומה הרצוייה, יכול לשלוף את הקופסה שהוא צריך או להחזיר אותה למקום.
זוהי התצורה הקלאסית של מחסן אוטומטי שראיתי בכל מני תצורות כאלה ואחרות, בחלקם אלה קופסאות, בחלק אחר אלה מגשים או משטחים ענקיים והעגורן יכול להיות סוג של מלגזה חצי אוטומטית על בן אדם שיושב בתוכה ועולה איתה על התקרה כדי לוודא שהוא מוציא משטח הנכון.
גם אם במקרה שלי העגורן צריך להתעסק עם קופסאות של כ-5 קילו, עדיין זו קונסטרוקציה לא קטנה, משהו שצריך להגיע לגובה של 2.5 מטר, מנועים, גלגלים, מסילות, מערכת של הצואת והכנסת הקופסאות מ/אל המדף... בקיצר לא פחות מכמה עשרות קילו. הדבר הזה לא יכול לזוז מהר וזה יהיה צוור הבקבוק במערכת (לבינתיים זה הדבר היחיד שזז, אז כדי שזה יעמוד בדרישה שצוור הבקבוק צריך להיות מספיק מהיר העגורן צריך לטוס הלוך ושוב, מה שלא יקרה).
השלב השני במחשבה שלי היה שצריך לשים כמה עגורנים, שכל אחד יטפל במדף או שתיים, ככה בעצם מכפילים את התפוקה. אבל אם אני שם אותם אחד אחרי השני, אז זה שמאחור לא יוכל למסור את הקופסה שלו למפעיל כי תמיד יש עגורן שמקדימה לו...
אז חשבתי לתפוס כמה ציפורים במכה וללכת לכיוון שיהיו מסילות מיוחדות לאורך המדפים, לכל קומה מסילה משלה ובמקום העגורן שצריך גם לנסוע קדימה ואחורה וגם לעלות ולרדת יהיו "קרוניות" שיסעו בקומה משלו על המסילות המיוחדות, כך בעצם גם הקטנתי את גודל העגורן ואפשר להזיז אותו הרבה יותר מהר וגם הכפלתי פי כמה וכמה את התפוקה כי אפשר להביא קופסאות מכמה קומות במקביל!
בשלב הזה פתחתי את השרשור בפורום makers כי בתצורה הזו לא מצאתי בראש דרך להעביר חשמל לקרוניות האלה. הדרך היחידה היא כנראה סוללות על כל קרונית ועמדות טעינה. בשלב זה ניסיתי להימנע משימוש בסוללות כי זה לא נראה לי יעיל וגם לא עמיד לאורך זמן, כלומר יהיה צורך להחליף אותם כל פרק זמן כלשהו.
בשלב מסויים הבנתי שקרוניות זה עוד לא סוף המערכת במצב הזה, צריך להיות גם משהו בסגנון של מעלית שיוכל להוריד ולעלות את הקופסאות מ/אל הקרוניות. במצב הזה הקרונית תוכל להכניס או להוציא את הקופסה מהמעלית בדיוק באותה הצורה כמו שהיא עושה עם המדף, אבל מכיוון שההכנסה וההוצאה של הקופסאות מהמדפים הוא תהליך יחסית איטי, זה אומר שהמעלית תהיה צוור הבקבוק במקרה הזה. להכפיל את כמות המעליות לא נראה לי כפתרון הנכון במקרה הזה וזה גם מסבך את המשך המערכת שצריכה להביא את הקופסה למפעיל, אז ירדתי מהצורה הזו לבינתיים.
בין לבין חברי הפורום הציעו לבנות את המחסן כמו שאמאזון עשו. מי שלא ראה, חייב לראות:
זה רק סרטון אחד שעלה ביוטיוב על הנושא הזה, יש עוה המון סרטונים וכולם משאירים אותי בשוק חיובי של מה שאנשים עשו...
מן הסתם זה הרבה יותר ממה שאני צריך או יכול לעשות עם המחסן. אני לא מתכוון להזיז את המדפים שלי
גם בסרטון אחר עם קצת יותר הסבר ראיתי שהמפעיל מכין בעצם כמה הזמנות במקביל. אם הרובוט כבר הביא את המדף, אז יאללה, בואו נמלא כמה הזמנות כם תוכן דומה... זה לא המקרה שלי.
אז אחרי מחשבות נוספות הגעתי לתצורה הזו:
יהיו עגורנים ה"קלאסיים" שיוכלו לזוז קדימה/אחורה ולמלה/למטה, אבל הם לא יצטרכו להביא את הקופסאות למפעיל, אלא יהיו 2 שורות של מסוע (יש מילה כזו ברבים?!). מסוע אחד יקח את הקופסאות למפעיל והשני יחזיר אותם לעגורן שיעלה אותם למקום. באמצע היה לי בראש גם כיוון שמסוע אחד יעבור במעבר בין המדפים שיביא את הקופסאות, אבל באיזה שהוא שלב נזכרתי שצריך גם להחזיר אותם, אז חשבתי על מסוע שילך מסביב למדפים ויתחבר למסוע של המעבר מאחור, כך המסוע לא יצטרך לשנות כיוון, אבל זה משבש את הדרישה שהמערכת צריכה לאפשר עבודה ידנית אם משהו משתבש ממש. להזיז את העגורנים עוד אפשר איך שהוא, אבל לפרק את המסוע זה כבר סיפור לא ישים.
ואז... ההברקה האחרונה שהמסוע יכול לעבור מתחת למדפים! יש מדך מכל צד של כל שורה, אז בצד אחד המבוע ינוע לכיוון של המפעיל כדי להביא קופסאות ובצד השני לכיוון השני כדי להחזיר את הקופסאות. כל מה שצריך בשביל זה, זה לסובב את הקופסה כדי שתהיה לאורך המסדרון וכך היא תוכל לעבור בין הרגליים של המדפים (רוחב הקופסה הרחבה הוא 24 ס"מ, עומק המדף הוא 40 ס"מ, נוריד כ-4 ס"מ מכל צד למבנה של הרגליים, נשאר 32 שזה אמור להספיק גם למבנה של המסוע אם יהיה צורך).
אני אוהב את הגישה של KISS - Keep It Simply Stupid, כלומר הפתרון צריך להיות כמה שיותר פשוט... אז הכיוון שחשבתי הוא שהעגורן כבר יודע להכניס ולהוציא את הקופסאות מהמדפים, אז הוא יוכל באותה הצורה להעביר אותם למסוע, אם יהיה חלק של המסוע שיוכל להסתובב ה-90 מעלות אל העגורן, העגורן ידחוף לשם את הקופסה, החלק הזה יסתובב שוב יחד עם הקופסה ואז הקופסה תוכל לנסוע על המסוע לכיוון של המפעיל. אותו הדבר גם בכיוון השני, הקופסה תגיע לצומת המסתובב, הוא יסובב אותה ב-90 מעלות, יבוא עגורן, יאסוף אותה וישים במקום. אפשר לשים צומת מסתובבת כזו מתחת לכל עמודה של מדפים, כך שהעגורן לא יצטרך לנסוע הרבה במסדרון, רק עד הצומת הקרובה.
זה הפתרון עליו עצרתי מאז שפרסמתי את הפוסט ב-makers לפני כשנתיים.
מאז חשבתי קצת אולי יש אפשרות פשוטה לסובב את הקופסה על העגורן כדי לפשט את המסוע ולרדת מהצמתים המסתובבים, כי בסופו של דבר יהיו פחות עגורנים מאשר עמודות של מדפים, כך שהגיוני לעשות את זה במקומות מרכזיים יותר מאפשר לפזר את המנגנון, אבל לא הצלחתי להגיע לפתרון פשוט. לסובב את הקופסה זה לא בעיה, הבעיה היא שאחרי זה העגורן צריך להניח אותה על המסוע מתחת למדף. אני רואה את המנגנון שמוציא את הקופסה מהמדף כמסוע קטן עם זרוע שמושך את הקופסה מהמדף אל המסוע. נניח שהמסוע יוכל להסתובב ב-90, אבל אז צריך שיהיה מנגנון כלשהו (מזלג כמו של מלגזה?) שירים את הקופסה מהמסוע של העגורן, יוכל לצאן החוצה כדי להוציא את הקופסה כ-30 ס"מ מתחת למדף... די בעייתי.
אחרי זה ניסיתי להריץ בראש איך אני מדמיין בכלל את המערכת שקרובה למפעיל. לפני שנתיים חשבתי על שורה אחת של מדפים, היום יש לי כבר שתי שורות, אז גם שם העניינים מתחילים להסתבך. צריך שגם ליד המפעיל יהיו 2 מסועים שינועו שמאלה וימינה כי הקופסה למפעיל הימני יכולה להגיע משורת המדפים שבצד שמאל ואחרי זה צריך גם להחזיר את הקופסה לשם... בקיצור סלט...
אנסה לצייר קצת כדי להמחיש איך הדברים אמורים לזוז:
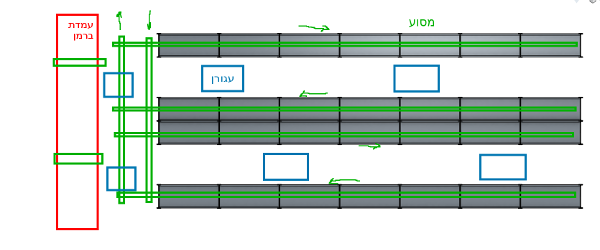
בציור אפשר לראות בצבע הירוק את המסוע שנראה לי שצריך, צבע האדום הוא איזור הברמן כמו שקראתי לו, שזה המנגנון שאמור להגיש למפעיל את הקופסאות, ובצבע הכחול העגורנים. שימו לב שיש גם מסוע קטן שיוצא לכיוון המפעילים (בצד שמאל), אליו הברמנים אמורים לשים את הקופסה שהמפעיל צריך כדי להוציא או להוסיף משהו. יכולים להיות כמה ברמנים, בדיוק כמו שיכולים להיות כמה עגורונים במסדרונות כדי ליעל את העבודה.
דווקא הצד שקרוב למפעל הוא פחות מבושל אצלי. לפני שנתיים כשבראש היה לי מסדרון אחד של מדפים הדברים היו פשוטים יותר, היה צריך להיות רק מסוע אחד ליד הברמנים, אבל עכשיו ברור לי שצריך להיות עוד מסוע שיוכל להחזיר את הקופסאות לשורה הנכונה של מדפים...
מה שכן היה מבושל אצלי זה שעמדת הברמן היא סוג של Cache של המערכת, שם הוא ישים את הקופסאות כמה שיותר קרוב למפעיל כדי לקצר את זמן ההחלפה של הקופסאות. אולי אפילו צריך 2 מסועים שיוצאים למפעיל, אחד עם קופסה שהוא עובד איתה והשני כבר טעון עם הקופסה הבאה. בזמן ההחלפה מסוע ראשון לוקח לו את הקופסה והשני מביא לו את ההבאה בתור. הברמן יקח את הקופסה שהוא לא צריך יותר, ישים אותה על המסוע בכיוון הנכון, יקח קופסה הבאה מה-Cache וישים על המסוע כהכנה לשלב הבא.
איך הברמן ישים ויקח את הקופסאות מהמסוע שעובר לידו? צומת מסתובבת! הנה עוד שימוש לצומת הזו. גם המפגש של המסוע שיוצא מהמדפים עם המסוע של הברמן יכול להיות כצומת מסתובבת...
אבל אם חושבים על זה לעומק, העניין די מסתבך. יש 2 מסועים לברמן, כל מסוע צריך מקום לסובב את הקופסה (נניח 50 ס"מ), צריך מקום לברמן כדי שיוכל לגשת לצומת המסתובבת שזה עוד 50 ס"מ לכל מסוע, כך שזה כבר 2 מטר שתפוסים ע"י המערכת הזו (שאני מעדיף לא לאבד כי כל ס"מ חשוב) ובנוסף לזה הברמן עצמו צריך להיות יותר מדי ארוך כדי להגיע לכל המקומות האלה...
ואם אני חושב על זה עוד ועוד אני מגיע חלקית לפתרון של אמאזון. שיהיו עגורנים שיטפלו במדפים, אבל במקום כל המסועים להשתמש ברובוטים שיסיעו את הקופסה למקום הרצוי. אני לא כל כך אוהב את הפתרון של רובוט על סוללה, אבל מאוד יכול להיות שמבחינה כלכלית זה יצא זול יותר מכל המסועים, כולל החלפת סוללות מדי פעם.
גם אם אני חושב רחוק יותר, ברור לי שאצטרך לעבור מקום בעוד כמה שנים, אז להעביר עשרים רובוטים ניידים יהיה הרבה יותר קל מאשר לפרק את כל מערכת המסועים שתהיה.
אחד האתגרים עם רובוט שכזה זה העובדה שהרצפה במחסן עקומה בצורה נוראית וכדי שהרובוטים יוכלו לנסוע עליה בצורה נורמלית צריך יהיה ליישר אותה איך שהוא... אולי לשים פרקט זול במקומות שהם אמורים לנסוע...
יתרון נוסף לפתרון עם רובוטים כמו של אמאזון, זה שיש חופש גדול יותר למיקום עמדות העבודה שזה יכול להיות די חשוב במחסן הנוכחי כדי לנצל את המקום טוב יותר.
כמו שאומרים, צריך לישון על זה ולחשוב לעומק. אולי אפילו לבנות רובוט אחד ולראות לאיזו מהירות הוא יכול להגיע עם המשקל שאני יכול לשים עליו, לראות איך הוא מתמודד עם הרצפה העקומה וכו'.
מה שישאר לחשוב עליו הוא מנגנון הרמה של הקופסאות בסופו של דבר למשתמש. כדי שהרובוט יהיה פשוט, הוא רק יסיע את הקופסה למקום שצריך, שם משהו אחר צריך לקחת ממנו את הקופסה (באותה הצורה כמו שהעגורן עושה). אולי צריך עגורן קטן ליד כל מפעיל. אבל כמו שכתבתי הכנסה והוצאה של קופסאות ע"י עגורן היא פעולה די איטית, כך שזה יפגע במהירות החלפת הקופסאות. צריך לחשוב על זה... אולי פתרון של שני מסועים ליד כל מפעיל, כמו שחשבתי קודם, או שאולי סוג של קרוסלה שתחליף את הקופסה ע"י תנועה של סיבוב (עוד לא הכי ברור לי אם זה אפשרי בכלל)...
אז לילה טוב בינתיים, הולך לישון על זה.
עדכון הבא כנראה בעוד די הרבה זמן עד שיהיה לי מישהו מבושל מספיק לכתוב עליו.
אם יש להם רעיונות או הערות, אשמח מאוד לשמוע. שיח יכול להביא לכיוונים שעוד לא חשבתי עליהם...
הדגש הוא יותר למבנה המכני כי זה החלק בגדול ביותר לדעתי ומשהו שלא יהיה קל לשנות. התוכנה זה תוכנה, אם משהו לא מסתדר תמיד אפשר להוסיף, לתקן ולסדר.
אז נחזור לדוגמא של האגורן שנוסע במסדרון של מדפים, משני הצדדים יש מדפים בגבהים שונים, העגורן נוסע לאורך המסדרון, יכול לעלות ולרדת כדי להגיע לקומה הרצוייה, יכול לשלוף את הקופסה שהוא צריך או להחזיר אותה למקום.
זוהי התצורה הקלאסית של מחסן אוטומטי שראיתי בכל מני תצורות כאלה ואחרות, בחלקם אלה קופסאות, בחלק אחר אלה מגשים או משטחים ענקיים והעגורן יכול להיות סוג של מלגזה חצי אוטומטית על בן אדם שיושב בתוכה ועולה איתה על התקרה כדי לוודא שהוא מוציא משטח הנכון.
גם אם במקרה שלי העגורן צריך להתעסק עם קופסאות של כ-5 קילו, עדיין זו קונסטרוקציה לא קטנה, משהו שצריך להגיע לגובה של 2.5 מטר, מנועים, גלגלים, מסילות, מערכת של הצואת והכנסת הקופסאות מ/אל המדף... בקיצר לא פחות מכמה עשרות קילו. הדבר הזה לא יכול לזוז מהר וזה יהיה צוור הבקבוק במערכת (לבינתיים זה הדבר היחיד שזז, אז כדי שזה יעמוד בדרישה שצוור הבקבוק צריך להיות מספיק מהיר העגורן צריך לטוס הלוך ושוב, מה שלא יקרה).
השלב השני במחשבה שלי היה שצריך לשים כמה עגורנים, שכל אחד יטפל במדף או שתיים, ככה בעצם מכפילים את התפוקה. אבל אם אני שם אותם אחד אחרי השני, אז זה שמאחור לא יוכל למסור את הקופסה שלו למפעיל כי תמיד יש עגורן שמקדימה לו...
אז חשבתי לתפוס כמה ציפורים במכה וללכת לכיוון שיהיו מסילות מיוחדות לאורך המדפים, לכל קומה מסילה משלה ובמקום העגורן שצריך גם לנסוע קדימה ואחורה וגם לעלות ולרדת יהיו "קרוניות" שיסעו בקומה משלו על המסילות המיוחדות, כך בעצם גם הקטנתי את גודל העגורן ואפשר להזיז אותו הרבה יותר מהר וגם הכפלתי פי כמה וכמה את התפוקה כי אפשר להביא קופסאות מכמה קומות במקביל!
בשלב הזה פתחתי את השרשור בפורום makers כי בתצורה הזו לא מצאתי בראש דרך להעביר חשמל לקרוניות האלה. הדרך היחידה היא כנראה סוללות על כל קרונית ועמדות טעינה. בשלב זה ניסיתי להימנע משימוש בסוללות כי זה לא נראה לי יעיל וגם לא עמיד לאורך זמן, כלומר יהיה צורך להחליף אותם כל פרק זמן כלשהו.
בשלב מסויים הבנתי שקרוניות זה עוד לא סוף המערכת במצב הזה, צריך להיות גם משהו בסגנון של מעלית שיוכל להוריד ולעלות את הקופסאות מ/אל הקרוניות. במצב הזה הקרונית תוכל להכניס או להוציא את הקופסה מהמעלית בדיוק באותה הצורה כמו שהיא עושה עם המדף, אבל מכיוון שההכנסה וההוצאה של הקופסאות מהמדפים הוא תהליך יחסית איטי, זה אומר שהמעלית תהיה צוור הבקבוק במקרה הזה. להכפיל את כמות המעליות לא נראה לי כפתרון הנכון במקרה הזה וזה גם מסבך את המשך המערכת שצריכה להביא את הקופסה למפעיל, אז ירדתי מהצורה הזו לבינתיים.
בין לבין חברי הפורום הציעו לבנות את המחסן כמו שאמאזון עשו. מי שלא ראה, חייב לראות:
זה רק סרטון אחד שעלה ביוטיוב על הנושא הזה, יש עוה המון סרטונים וכולם משאירים אותי בשוק חיובי של מה שאנשים עשו...
מן הסתם זה הרבה יותר ממה שאני צריך או יכול לעשות עם המחסן. אני לא מתכוון להזיז את המדפים שלי
גם בסרטון אחר עם קצת יותר הסבר ראיתי שהמפעיל מכין בעצם כמה הזמנות במקביל. אם הרובוט כבר הביא את המדף, אז יאללה, בואו נמלא כמה הזמנות כם תוכן דומה... זה לא המקרה שלי.
אז אחרי מחשבות נוספות הגעתי לתצורה הזו:
יהיו עגורנים ה"קלאסיים" שיוכלו לזוז קדימה/אחורה ולמלה/למטה, אבל הם לא יצטרכו להביא את הקופסאות למפעיל, אלא יהיו 2 שורות של מסוע (יש מילה כזו ברבים?!). מסוע אחד יקח את הקופסאות למפעיל והשני יחזיר אותם לעגורן שיעלה אותם למקום. באמצע היה לי בראש גם כיוון שמסוע אחד יעבור במעבר בין המדפים שיביא את הקופסאות, אבל באיזה שהוא שלב נזכרתי שצריך גם להחזיר אותם
ואז... ההברקה האחרונה שהמסוע יכול לעבור מתחת למדפים! יש מדך מכל צד של כל שורה, אז בצד אחד המבוע ינוע לכיוון של המפעיל כדי להביא קופסאות ובצד השני לכיוון השני כדי להחזיר את הקופסאות. כל מה שצריך בשביל זה, זה לסובב את הקופסה כדי שתהיה לאורך המסדרון וכך היא תוכל לעבור בין הרגליים של המדפים (רוחב הקופסה הרחבה הוא 24 ס"מ, עומק המדף הוא 40 ס"מ, נוריד כ-4 ס"מ מכל צד למבנה של הרגליים, נשאר 32 שזה אמור להספיק גם למבנה של המסוע אם יהיה צורך).
אני אוהב את הגישה של KISS - Keep It Simply Stupid, כלומר הפתרון צריך להיות כמה שיותר פשוט... אז הכיוון שחשבתי הוא שהעגורן כבר יודע להכניס ולהוציא את הקופסאות מהמדפים, אז הוא יוכל באותה הצורה להעביר אותם למסוע, אם יהיה חלק של המסוע שיוכל להסתובב ה-90 מעלות אל העגורן, העגורן ידחוף לשם את הקופסה, החלק הזה יסתובב שוב יחד עם הקופסה ואז הקופסה תוכל לנסוע על המסוע לכיוון של המפעיל. אותו הדבר גם בכיוון השני, הקופסה תגיע לצומת המסתובב, הוא יסובב אותה ב-90 מעלות, יבוא עגורן, יאסוף אותה וישים במקום. אפשר לשים צומת מסתובבת כזו מתחת לכל עמודה של מדפים, כך שהעגורן לא יצטרך לנסוע הרבה במסדרון, רק עד הצומת הקרובה.
זה הפתרון עליו עצרתי מאז שפרסמתי את הפוסט ב-makers לפני כשנתיים.
מאז חשבתי קצת אולי יש אפשרות פשוטה לסובב את הקופסה על העגורן כדי לפשט את המסוע ולרדת מהצמתים המסתובבים, כי בסופו של דבר יהיו פחות עגורנים מאשר עמודות של מדפים, כך שהגיוני לעשות את זה במקומות מרכזיים יותר מאפשר לפזר את המנגנון, אבל לא הצלחתי להגיע לפתרון פשוט. לסובב את הקופסה זה לא בעיה, הבעיה היא שאחרי זה העגורן צריך להניח אותה על המסוע מתחת למדף. אני רואה את המנגנון שמוציא את הקופסה מהמדף כמסוע קטן עם זרוע שמושך את הקופסה מהמדף אל המסוע. נניח שהמסוע יוכל להסתובב ב-90, אבל אז צריך שיהיה מנגנון כלשהו (מזלג כמו של מלגזה?) שירים את הקופסה מהמסוע של העגורן, יוכל לצאן החוצה כדי להוציא את הקופסה כ-30 ס"מ מתחת למדף... די בעייתי.
אחרי זה ניסיתי להריץ בראש איך אני מדמיין בכלל את המערכת שקרובה למפעיל. לפני שנתיים חשבתי על שורה אחת של מדפים, היום יש לי כבר שתי שורות, אז גם שם העניינים מתחילים להסתבך. צריך שגם ליד המפעיל יהיו 2 מסועים שינועו שמאלה וימינה כי הקופסה למפעיל הימני יכולה להגיע משורת המדפים שבצד שמאל ואחרי זה צריך גם להחזיר את הקופסה לשם... בקיצור סלט...
אנסה לצייר קצת כדי להמחיש איך הדברים אמורים לזוז:
בציור אפשר לראות בצבע הירוק את המסוע שנראה לי שצריך, צבע האדום הוא איזור הברמן כמו שקראתי לו, שזה המנגנון שאמור להגיש למפעיל את הקופסאות, ובצבע הכחול העגורנים. שימו לב שיש גם מסוע קטן שיוצא לכיוון המפעילים (בצד שמאל), אליו הברמנים אמורים לשים את הקופסה שהמפעיל צריך כדי להוציא או להוסיף משהו. יכולים להיות כמה ברמנים, בדיוק כמו שיכולים להיות כמה עגורונים במסדרונות כדי ליעל את העבודה.
דווקא הצד שקרוב למפעל הוא פחות מבושל אצלי. לפני שנתיים כשבראש היה לי מסדרון אחד של מדפים הדברים היו פשוטים יותר, היה צריך להיות רק מסוע אחד ליד הברמנים, אבל עכשיו ברור לי שצריך להיות עוד מסוע שיוכל להחזיר את הקופסאות לשורה הנכונה של מדפים...
מה שכן היה מבושל אצלי זה שעמדת הברמן היא סוג של Cache של המערכת, שם הוא ישים את הקופסאות כמה שיותר קרוב למפעיל כדי לקצר את זמן ההחלפה של הקופסאות. אולי אפילו צריך 2 מסועים שיוצאים למפעיל, אחד עם קופסה שהוא עובד איתה והשני כבר טעון עם הקופסה הבאה. בזמן ההחלפה מסוע ראשון לוקח לו את הקופסה והשני מביא לו את ההבאה בתור. הברמן יקח את הקופסה שהוא לא צריך יותר, ישים אותה על המסוע בכיוון הנכון, יקח קופסה הבאה מה-Cache וישים על המסוע כהכנה לשלב הבא.
איך הברמן ישים ויקח את הקופסאות מהמסוע שעובר לידו? צומת מסתובבת! הנה עוד שימוש לצומת הזו. גם המפגש של המסוע שיוצא מהמדפים עם המסוע של הברמן יכול להיות כצומת מסתובבת...
אבל אם חושבים על זה לעומק, העניין די מסתבך. יש 2 מסועים לברמן, כל מסוע צריך מקום לסובב את הקופסה (נניח 50 ס"מ), צריך מקום לברמן כדי שיוכל לגשת לצומת המסתובבת שזה עוד 50 ס"מ לכל מסוע, כך שזה כבר 2 מטר שתפוסים ע"י המערכת הזו (שאני מעדיף לא לאבד כי כל ס"מ חשוב) ובנוסף לזה הברמן עצמו צריך להיות יותר מדי ארוך כדי להגיע לכל המקומות האלה...
ואם אני חושב על זה עוד ועוד אני מגיע חלקית לפתרון של אמאזון. שיהיו עגורנים שיטפלו במדפים, אבל במקום כל המסועים להשתמש ברובוטים שיסיעו את הקופסה למקום הרצוי. אני לא כל כך אוהב את הפתרון של רובוט על סוללה, אבל מאוד יכול להיות שמבחינה כלכלית זה יצא זול יותר מכל המסועים, כולל החלפת סוללות מדי פעם.
גם אם אני חושב רחוק יותר, ברור לי שאצטרך לעבור מקום בעוד כמה שנים, אז להעביר עשרים רובוטים ניידים יהיה הרבה יותר קל מאשר לפרק את כל מערכת המסועים שתהיה.
אחד האתגרים עם רובוט שכזה זה העובדה שהרצפה במחסן עקומה בצורה נוראית וכדי שהרובוטים יוכלו לנסוע עליה בצורה נורמלית צריך יהיה ליישר אותה איך שהוא... אולי לשים פרקט זול במקומות שהם אמורים לנסוע...
יתרון נוסף לפתרון עם רובוטים כמו של אמאזון, זה שיש חופש גדול יותר למיקום עמדות העבודה שזה יכול להיות די חשוב במחסן הנוכחי כדי לנצל את המקום טוב יותר.
כמו שאומרים, צריך לישון על זה ולחשוב לעומק. אולי אפילו לבנות רובוט אחד ולראות לאיזו מהירות הוא יכול להגיע עם המשקל שאני יכול לשים עליו, לראות איך הוא מתמודד עם הרצפה העקומה וכו'.
מה שישאר לחשוב עליו הוא מנגנון הרמה של הקופסאות בסופו של דבר למשתמש. כדי שהרובוט יהיה פשוט, הוא רק יסיע את הקופסה למקום שצריך, שם משהו אחר צריך לקחת ממנו את הקופסה (באותה הצורה כמו שהעגורן עושה). אולי צריך עגורן קטן ליד כל מפעיל. אבל כמו שכתבתי הכנסה והוצאה של קופסאות ע"י עגורן היא פעולה די איטית, כך שזה יפגע במהירות החלפת הקופסאות. צריך לחשוב על זה... אולי פתרון של שני מסועים ליד כל מפעיל, כמו שחשבתי קודם, או שאולי סוג של קרוסלה שתחליף את הקופסה ע"י תנועה של סיבוב (עוד לא הכי ברור לי אם זה אפשרי בכלל)...
אז לילה טוב בינתיים, הולך לישון על זה.
עדכון הבא כנראה בעוד די הרבה זמן עד שיהיה לי מישהו מבושל מספיק לכתוב עליו.
אם יש להם רעיונות או הערות, אשמח מאוד לשמוע. שיח יכול להביא לכיוונים שעוד לא חשבתי עליהם...
www.4project.co.il
כל הרכיבים לפרוייקט שלכם
כל הרכיבים לפרוייקט שלכם
Re: הייתי רוצה לבנות: מחסן אוטומטי
הייתי קצת מוטרד שרובוטים קטנים לא יוכלו להגיע למהירות מספיק גבוהה כדי שלא אצטרך לחכות יותר מדי להגעת הקופסה...
עשיתי ניסוי קטן, מדדתי את הזמן שלוקח לי עם העגלה להגיע לסוף השורה ולחזור לאותו המקום בקצב שאני בדרך כלל עובר שם, עם הרצפה העקומה ועם זה שבחזרה אני הולך עם הגב קדימה כי אין שם מקום להסתובב...
החישוב הראה שהמהירות שלי היתה כ-40 מטר לדקה.
רציתי לבדוק לאיזו מהירות מגיעים הרובוטים הפשוטים שאני מוכר, אז הפלטפורמה Junior Runt Rover, עם מנועי פלסטיק פשוטים מאוד, לפי החישובים מגיעה ל-28 מטר לדקה.
ה-mBot עם מנוע מתכתי יחסית פשוט מגיע ל-37 מטר בדקה שזה די קרוב למהירות ההליכה שלי.
צריך להתחשב בזה שהרובוט צריך לעצור כדי להסתובב מה שיקח כמה שניות, המסלול שהלכתי לא היה ישר, אז צריך להירות גבוהה יותר ממהירות ההליכה שלי.
חיפשתי ברשת נתונים על הרובוטים של Amazon במחסנים שלהם כדי להבין באיזו מהירות הם נוסעים, אבל לא מצאתי את הנתון... אבל מצאתי נתונים על רובוטים די דומים של חברה אחרת והיה רשום שהם יכולים להעבור עד 1.2 טון!!! במהירות של עד 60 מטר בדקה. זו מהירות די מכובדת עם משקל עוד יותר מכובד. לא רשמתי בדרישות, אבל אני לא מתכנן להעביר יותר מ-10 קילו על הרובוטים האלה. בפעם האחרונה שבדקתי, היו קופסאות בודדות שעברו את ה-5 קילו בקצת, אז 10 קילו נשמע לי כמספיק בשלב זה.
אז הניסוי והחיפושים ברשת מרגיעים אותי בינתיים. אפשר להמשיך לחשוב על מימוש בעזרת עגורנים ורובוטים שמתרוצצים על הרצפה של המחסן.
עוד אין לי כיוון סגור לעמדת המפעיל. קרוסלה מסוג כלשהו יכול להיות פתרון נחמד, אבל הוא לא טוב כי נניח יש 5 קופסאות בקרוסלה הזו, אחת בשימוש ו-4 ממתינות ב-cache. עד כאן הכל טוב ויפה, אבל אם סיימתי להשתמש בקופסה שהיתה בשימוש, אי אפשר יהיה להוציא אותה מהקרוסלה עד ש-4 האחרות לא יסיימו ויכולים להיות מצבים שמפעיל אחר צריך את הקופסה הזו להזמנה שהוא מכין וזה בעצם מייצר צוור בקבוק נוסף במערכת.
בינתיים מסתדר לי בראש פתרון של 2 מסועים ליד המפעיל, על אחד יהיו כמה קופסאות בטור למפעיל, כשמסיימים עם קופסה כלשהי, היא עוברת הצידה למסוע השני שלוקח את הקופסה מהמפעיל. אורך הטור של המסוע יכול להיות שימושי גם להבאת הקופסאות כדי לקצר את זמן ההמתנה של החלפת הקופסאות וגם להוצאת הקופסאות שימתינו זמן מה עד שרובוט יבוא לאסוף אותה. כדי לטפל במסועים האלה אפשר לשים שתי מעליות שכל תפקידם הוא להעלות את הקופסאות מהרובוט לגובה השולחן של המפעיל ולהוריד אותם בחזרה אחרי השימוש. צריך לראות איך זה מסתדר מבחינת מקום כי לא בטוח אם יש לי מקום לטור ארוך. טור של 2 מקומות + מעלית זה כבר כ-1.5 מטר...
אולי... אם אשים שתי עמדות מפעיל גב אל גב, אז יכולה מהיות מעלית אחת לשתי עמדות, מה שיחסוך גם מקום וגם עלויות! צריך לנסות לשרטט את זה...
עשיתי ניסוי קטן, מדדתי את הזמן שלוקח לי עם העגלה להגיע לסוף השורה ולחזור לאותו המקום בקצב שאני בדרך כלל עובר שם, עם הרצפה העקומה ועם זה שבחזרה אני הולך עם הגב קדימה כי אין שם מקום להסתובב...
החישוב הראה שהמהירות שלי היתה כ-40 מטר לדקה.
רציתי לבדוק לאיזו מהירות מגיעים הרובוטים הפשוטים שאני מוכר, אז הפלטפורמה Junior Runt Rover, עם מנועי פלסטיק פשוטים מאוד, לפי החישובים מגיעה ל-28 מטר לדקה.
ה-mBot עם מנוע מתכתי יחסית פשוט מגיע ל-37 מטר בדקה שזה די קרוב למהירות ההליכה שלי.
צריך להתחשב בזה שהרובוט צריך לעצור כדי להסתובב מה שיקח כמה שניות, המסלול שהלכתי לא היה ישר, אז צריך להירות גבוהה יותר ממהירות ההליכה שלי.
חיפשתי ברשת נתונים על הרובוטים של Amazon במחסנים שלהם כדי להבין באיזו מהירות הם נוסעים, אבל לא מצאתי את הנתון... אבל מצאתי נתונים על רובוטים די דומים של חברה אחרת והיה רשום שהם יכולים להעבור עד 1.2 טון!!! במהירות של עד 60 מטר בדקה. זו מהירות די מכובדת עם משקל עוד יותר מכובד. לא רשמתי בדרישות, אבל אני לא מתכנן להעביר יותר מ-10 קילו על הרובוטים האלה. בפעם האחרונה שבדקתי, היו קופסאות בודדות שעברו את ה-5 קילו בקצת, אז 10 קילו נשמע לי כמספיק בשלב זה.
אז הניסוי והחיפושים ברשת מרגיעים אותי בינתיים. אפשר להמשיך לחשוב על מימוש בעזרת עגורנים ורובוטים שמתרוצצים על הרצפה של המחסן.
עוד אין לי כיוון סגור לעמדת המפעיל. קרוסלה מסוג כלשהו יכול להיות פתרון נחמד, אבל הוא לא טוב כי נניח יש 5 קופסאות בקרוסלה הזו, אחת בשימוש ו-4 ממתינות ב-cache. עד כאן הכל טוב ויפה, אבל אם סיימתי להשתמש בקופסה שהיתה בשימוש, אי אפשר יהיה להוציא אותה מהקרוסלה עד ש-4 האחרות לא יסיימו ויכולים להיות מצבים שמפעיל אחר צריך את הקופסה הזו להזמנה שהוא מכין וזה בעצם מייצר צוור בקבוק נוסף במערכת.
בינתיים מסתדר לי בראש פתרון של 2 מסועים ליד המפעיל, על אחד יהיו כמה קופסאות בטור למפעיל, כשמסיימים עם קופסה כלשהי, היא עוברת הצידה למסוע השני שלוקח את הקופסה מהמפעיל. אורך הטור של המסוע יכול להיות שימושי גם להבאת הקופסאות כדי לקצר את זמן ההמתנה של החלפת הקופסאות וגם להוצאת הקופסאות שימתינו זמן מה עד שרובוט יבוא לאסוף אותה. כדי לטפל במסועים האלה אפשר לשים שתי מעליות שכל תפקידם הוא להעלות את הקופסאות מהרובוט לגובה השולחן של המפעיל ולהוריד אותם בחזרה אחרי השימוש. צריך לראות איך זה מסתדר מבחינת מקום כי לא בטוח אם יש לי מקום לטור ארוך. טור של 2 מקומות + מעלית זה כבר כ-1.5 מטר...
אולי... אם אשים שתי עמדות מפעיל גב אל גב, אז יכולה מהיות מעלית אחת לשתי עמדות, מה שיחסוך גם מקום וגם עלויות! צריך לנסות לשרטט את זה...
www.4project.co.il
כל הרכיבים לפרוייקט שלכם
כל הרכיבים לפרוייקט שלכם
Re: הייתי רוצה לבנות: מחסן אוטומטי
טוב... נראה לי שזה הולך להיות הפרוייקט הכי מבושל שלי עד עכשיו מסדרת ה-"הייתי רוצה לבנות" ומקווה מאוד שגם יגיע לשלב הביצוע מתי שהוא.
חשבתי עוד ועוד על איך אפשר יהיה לסדר את השולחנות במקום הנוכחי ומזה נגזר גם הכיוון של איך יראה המנגנון של העלאת הקופסאות לשולחן המפעיל. הכוונה בבחירת המחסן החדש היתה שאפשר יהיה לשים 2 שולנות אריזה. במצבי לחץ שני אנשים יוכלו להכין את ההזמנות בו זמנית, אבל יותר חשוב לי שאפשר יהיה להכין את ההזמנות בעמדה אחת ובו זמנית למלא את המחסן מהחבילות שמגיעות מהספקים (פעולה שאורכת לא מעט זמן).
הדבר הראשון שהגעתי אליו הוא שאני צריך לוותר על עמודה אחת של מדפים במעברים. מזכיר את הפוסט הראשון, התכנון הראשוני היה 2 מעברים עם מדפים מכל צד (4 שורות) ובכל שורה 7 עמודות. כרגע יש לי שורה אחת עם 7 עמודות, שורה שמולה באותו המעבר עם 5 עמודות ועוד שתי שורות ריקות שכרגע אני מאחסן שם דברים זמניים בקופסאות גדולות. וגם בשורות עם הקופסאות מעל המדפים אני מאחסן קופסאות גדולות עם מוצרים שלא פיזרתי לקופסאות מסיבות כאלה ואחרות (למשל כשיש לי יותר מדי מאותם המוצרים) וגם חומר אריזה (קופסאות, שקיות וכו').
אם אני אממש את המחסן האוטומטי, זה אומר שהמדפים העליונים יהיו תפוסים עם הקופסאות הכחולות כי העגורן יוכל להגיע למקומות שאני לא יכול להגיע בלי סולם או מדרגה, אז אצטרך מקום אחר לכל מה שיש לי למעלה והאמת גם לכל מה שיש לי מתחת למדפים שזה גם לא מעט, אבל אלה דברים שברובם אפשר יהיה לפזר לקופסאות שיתווספו. מה גם, שאיך שלא אממש את המחסן (רובוטים קטנים שמביאים את הקופסאות או מסועים שעליהם נוסעים הקופסאות), עדיין אצטרך להשאיר מקום כדי שהמנגנון יוכל להעביר את הקופסאות מצד לצד (ראו הסברים קודמים על המקום שתופס מסוע של הברמן).
אז הפעלתי את התוכנה המצויינת לשרטוט ארכיטקטורה בתלת מימד, שהשתמשתי בה לתוכניות שיפוץ הדירה שקניתי. תוכנה חינמית שנקראת SweetHome3D - ממליץ בחום! שרטטתי את הקירות של המחסן, הדבקתי את המדפים והשולחנות והתחלתי לסובב אותם ולראות כמה מקום נשאר מכל הצדדים בניסיון להשאיר גם מעבר לרובוטים (בינתיים אני נוטה לכיוון הזה ולא למסועים מתחת למדפים), וזה מה שהגעתי אליו תוך כדי מיקום 2 שולחנות אריזה בגודל של שולחן שיש לי כרגע:
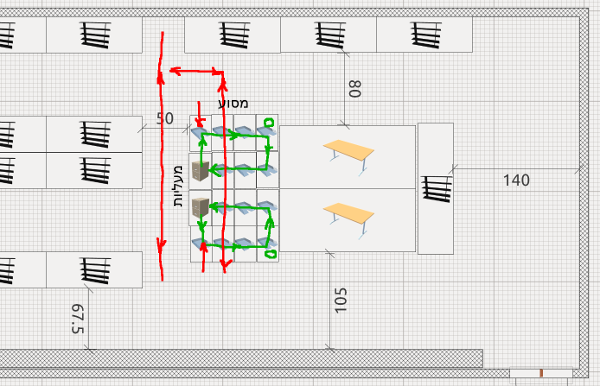
משהו שהיה ברור לי עוד מהימים שחשבתי שתהיה עמדת ברמן, זה שחייב להיות איזור ה-Cache לקופסאות, כלומר שיהיו כמה קופסאות מוכנות שכאשר המפעיל מסיים לטפל בקופסה מסויימת תגיע אליו קופסה הבאה הכי מהר שאפשר כדי לא להכניס המתנות בין מוצר למוצר. אז בתצורה הזו שהגעתי אליה יש מסוע שמסומן בחצים הירוקים ויש מעלית שתעלה קופסאות שצריכות לעבור טיפול ותוריד את הקופסאות אחרי הטיפול.
בהתחלה חשבתי שצריך אולי 2 מעליות, אחת תוריד והשניה תעלה כדי לחסוך בזמן, אבל אז נפל האסימון שכדי לעלות קופסה הבאה המעלית בכל מקרה צריכה לרדת, אז אם היא כבר יורדת, שתוריד את הקופסה שהתפנתה... זה יגזול קצת זמן, אבל אני מניח שהמסוע שמשמש כ-Cache יפצה על זה.
גם במקרה שהיו שתי מעליות היה צריך לשבור את הראש לדרכי גישה לרובוטים כד שזה שמביא קופסה לא יפריע לזה שלוקח, עכשיו כשיש מעלית אחת, אז אותו הרובוט שהביא קופסה יוכל לקחת את הקופסה שהמעלית תוריד שזה נראה לי יכול לחסוך בכמות הרובוטים שצריך לכל המחסן.
אז הקופסה שעולה לגובה השולחן נכנסת למסוע שקרוב למפעיל ובסופו של דבר מגיעה לחלק הקרוב ביותר למפעיל, המסומן בעיגול ירוק. כשהמפעיל יסיים עם הקופסה, ילחץ על איזה שהוא כפתור והקופסה תעבור לחלק האחורי של המסוע, משם לכיוון המעלית עד שתרד ותפונה למקום.
ציירתי 4 קופסאות ברוחב 24 ס"מ (הקופסה הגדולה שיש לי) שלפי התחושה שלי נראה שזה יספיק. אפשר יהיה לבנות את המסוע בצורה כזו שיוכל לטפל בגודל משתנה של הקופסאות, כלומר במקום של 4 קופסאות גדולות יוכלו להכנס 6 בינוניות או 8 קטנות, כך שבפעול יהיה ערבוב של גדלים שונים עד למקסימום שאפשר להכניס באורך של המסוע.
עוד דבר טוב שיצא מהתכנון הזה, זה שהמסועים האלה נמצאים בגובה של השולחן, כך שמתחת יש מקום פנוי למעבר של הרובוטים וזה בעצם מאפשר לקרב את השולחנות כחצי מטר לכיוון המדפים. השארתי בין המדפים למעליות חצי מטר כדי שיהיה נתיב אחד למעבר של הרובוטים (הקופסה באורך 40 ס"מ, פלוס עוד קצת) ומתחת למסוע של השולחן יש מקום לעוד 2 נתיבים, כך שאני מניח שיהיה מספיק מקום להסתובבויות של הרובוטים במקום הזה.
ואם כבר לנצל את המעברים מתחת למסוע, אז כשאחשוב על המבנה של העגורונים, אפשר יהיה לנסות לבנות אותם כך שגם מתחת לעגורן אפשר יהיה לעבור לאורך המסדרון כדי שהיה כמה שיותר חופש תנועה ופחות סיבובים שצריך לעשות (פחות סיבובים = פחות לחכות לקופסה).
בינתיים אנסה לסכם למה החלטתי על הכיוון של הרובוטים שיביאו את הקופסאות ולא מסוע מתחת למדפים:
בעד:
חשבתי עוד ועוד על איך אפשר יהיה לסדר את השולחנות במקום הנוכחי ומזה נגזר גם הכיוון של איך יראה המנגנון של העלאת הקופסאות לשולחן המפעיל. הכוונה בבחירת המחסן החדש היתה שאפשר יהיה לשים 2 שולנות אריזה. במצבי לחץ שני אנשים יוכלו להכין את ההזמנות בו זמנית, אבל יותר חשוב לי שאפשר יהיה להכין את ההזמנות בעמדה אחת ובו זמנית למלא את המחסן מהחבילות שמגיעות מהספקים (פעולה שאורכת לא מעט זמן).
הדבר הראשון שהגעתי אליו הוא שאני צריך לוותר על עמודה אחת של מדפים במעברים. מזכיר את הפוסט הראשון, התכנון הראשוני היה 2 מעברים עם מדפים מכל צד (4 שורות) ובכל שורה 7 עמודות. כרגע יש לי שורה אחת עם 7 עמודות, שורה שמולה באותו המעבר עם 5 עמודות ועוד שתי שורות ריקות שכרגע אני מאחסן שם דברים זמניים בקופסאות גדולות. וגם בשורות עם הקופסאות מעל המדפים אני מאחסן קופסאות גדולות עם מוצרים שלא פיזרתי לקופסאות מסיבות כאלה ואחרות (למשל כשיש לי יותר מדי מאותם המוצרים) וגם חומר אריזה (קופסאות, שקיות וכו').
אם אני אממש את המחסן האוטומטי, זה אומר שהמדפים העליונים יהיו תפוסים עם הקופסאות הכחולות כי העגורן יוכל להגיע למקומות שאני לא יכול להגיע בלי סולם או מדרגה, אז אצטרך מקום אחר לכל מה שיש לי למעלה והאמת גם לכל מה שיש לי מתחת למדפים שזה גם לא מעט, אבל אלה דברים שברובם אפשר יהיה לפזר לקופסאות שיתווספו. מה גם, שאיך שלא אממש את המחסן (רובוטים קטנים שמביאים את הקופסאות או מסועים שעליהם נוסעים הקופסאות), עדיין אצטרך להשאיר מקום כדי שהמנגנון יוכל להעביר את הקופסאות מצד לצד (ראו הסברים קודמים על המקום שתופס מסוע של הברמן).
אז הפעלתי את התוכנה המצויינת לשרטוט ארכיטקטורה בתלת מימד, שהשתמשתי בה לתוכניות שיפוץ הדירה שקניתי. תוכנה חינמית שנקראת SweetHome3D - ממליץ בחום! שרטטתי את הקירות של המחסן, הדבקתי את המדפים והשולחנות והתחלתי לסובב אותם ולראות כמה מקום נשאר מכל הצדדים בניסיון להשאיר גם מעבר לרובוטים (בינתיים אני נוטה לכיוון הזה ולא למסועים מתחת למדפים), וזה מה שהגעתי אליו תוך כדי מיקום 2 שולחנות אריזה בגודל של שולחן שיש לי כרגע:
משהו שהיה ברור לי עוד מהימים שחשבתי שתהיה עמדת ברמן, זה שחייב להיות איזור ה-Cache לקופסאות, כלומר שיהיו כמה קופסאות מוכנות שכאשר המפעיל מסיים לטפל בקופסה מסויימת תגיע אליו קופסה הבאה הכי מהר שאפשר כדי לא להכניס המתנות בין מוצר למוצר. אז בתצורה הזו שהגעתי אליה יש מסוע שמסומן בחצים הירוקים ויש מעלית שתעלה קופסאות שצריכות לעבור טיפול ותוריד את הקופסאות אחרי הטיפול.
בהתחלה חשבתי שצריך אולי 2 מעליות, אחת תוריד והשניה תעלה כדי לחסוך בזמן, אבל אז נפל האסימון שכדי לעלות קופסה הבאה המעלית בכל מקרה צריכה לרדת, אז אם היא כבר יורדת, שתוריד את הקופסה שהתפנתה... זה יגזול קצת זמן, אבל אני מניח שהמסוע שמשמש כ-Cache יפצה על זה.
גם במקרה שהיו שתי מעליות היה צריך לשבור את הראש לדרכי גישה לרובוטים כד שזה שמביא קופסה לא יפריע לזה שלוקח, עכשיו כשיש מעלית אחת, אז אותו הרובוט שהביא קופסה יוכל לקחת את הקופסה שהמעלית תוריד שזה נראה לי יכול לחסוך בכמות הרובוטים שצריך לכל המחסן.
אז הקופסה שעולה לגובה השולחן נכנסת למסוע שקרוב למפעיל ובסופו של דבר מגיעה לחלק הקרוב ביותר למפעיל, המסומן בעיגול ירוק. כשהמפעיל יסיים עם הקופסה, ילחץ על איזה שהוא כפתור והקופסה תעבור לחלק האחורי של המסוע, משם לכיוון המעלית עד שתרד ותפונה למקום.
ציירתי 4 קופסאות ברוחב 24 ס"מ (הקופסה הגדולה שיש לי) שלפי התחושה שלי נראה שזה יספיק. אפשר יהיה לבנות את המסוע בצורה כזו שיוכל לטפל בגודל משתנה של הקופסאות, כלומר במקום של 4 קופסאות גדולות יוכלו להכנס 6 בינוניות או 8 קטנות, כך שבפעול יהיה ערבוב של גדלים שונים עד למקסימום שאפשר להכניס באורך של המסוע.
עוד דבר טוב שיצא מהתכנון הזה, זה שהמסועים האלה נמצאים בגובה של השולחן, כך שמתחת יש מקום פנוי למעבר של הרובוטים וזה בעצם מאפשר לקרב את השולחנות כחצי מטר לכיוון המדפים. השארתי בין המדפים למעליות חצי מטר כדי שיהיה נתיב אחד למעבר של הרובוטים (הקופסה באורך 40 ס"מ, פלוס עוד קצת) ומתחת למסוע של השולחן יש מקום לעוד 2 נתיבים, כך שאני מניח שיהיה מספיק מקום להסתובבויות של הרובוטים במקום הזה.
ואם כבר לנצל את המעברים מתחת למסוע, אז כשאחשוב על המבנה של העגורונים, אפשר יהיה לנסות לבנות אותם כך שגם מתחת לעגורן אפשר יהיה לעבור לאורך המסדרון כדי שהיה כמה שיותר חופש תנועה ופחות סיבובים שצריך לעשות (פחות סיבובים = פחות לחכות לקופסה).
בינתיים אנסה לסכם למה החלטתי על הכיוון של הרובוטים שיביאו את הקופסאות ולא מסוע מתחת למדפים:
בעד:
- חופש התנועה, אפשר תמיד לשנות את כיווני התנועה והמיקום של המקומות אליהם הקופסה צריכה להגיע בסופו של דבר
- הרובוט יהיה כנראה פשוט יותר ממסוע עם מנגנון סיבוב של הקופסה
- כמות הרובוטים הדרושה נגזרת יותר מכמות המפעילים שצריך לשרת בו זמנית ופחות מכמות המדפים. הצפי הוא שהמחסן יגדל הרבה יותר מכמות המפעילים, כך שעם הזמן עלות התועלת של הרובוטים רק תגדל.
- עלות התחלתית, אפשר להתחיל לעבוד עם רובוט בודד (יהיה איטי, אבל עדיין אפשר), לעומת מסוע שצריך להשלים את כולו כדי שאפשר יהיה לקבל את הקופסה מכל מקום קיים במחסן.
- שימוש בסוללות - צריך להטעין כל זמן מה ויהיה בלאי שיצריך להחליף את הסוללות
- צריך כמות גדולה יותר של הרובוטים ממה שדרוש בפועל כדי לפצות על אלה שיצטרכו טעינה באמצע ההיום
www.4project.co.il
כל הרכיבים לפרוייקט שלכם
כל הרכיבים לפרוייקט שלכם
Re: הייתי רוצה לבנות: מחסן אוטומטי
התחלתי לחשוב איך יראה הרובוט שאמור להעביר את הקופסאות ברחבי המחסן...
קודם כל, מדדתי את המרווחים בין הרגליים של המדפים, שם הייתי רוצה שהרובוטים יסתובבו וזה מה שיצא:
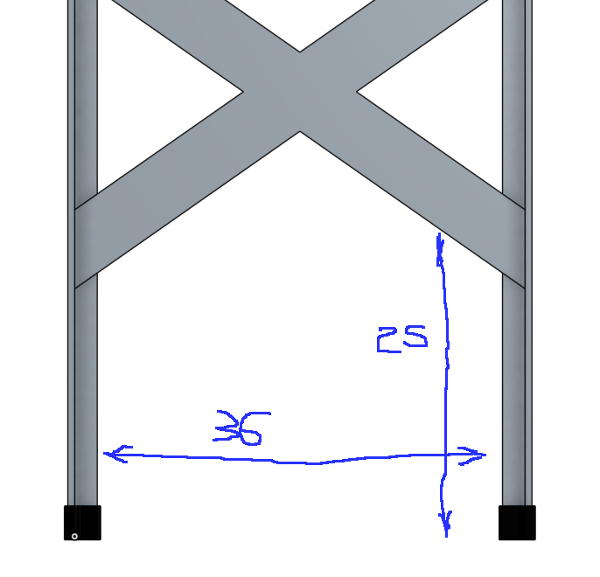
לרוחב יש בערך 36 ס"מ, לגובה עד למקום בו הקופסה הרחבה נוגעת יש כ-25 ס"מ.
גובה הקופסה הוא 10 ס"מ, כך שגובה הרובוט צריך להיות פחות מ-15 ס"מ.
אני רואה את הרובוט כמסוע מלמעלה, אליה יטענו הקופסאות ע"י העגורנים או מעלית, מלמטה אמורים להיות 2 גלגלים בצדדים ו-2 גלגלים כל כיווניים מקדים ואחורה כדי לתמוך בקופסה הארוכה.
התחלתי לתכנן קודם את החלק העליון, ממנו נגזר הרוחב של הרובוט...
אורך הקופסאות הוא 40 ס"מ, אז רציתי להשתמש בשני פרופילים מסדרת Actobotics באורך 15.0" (381 מ"מ) כאלה כמסגרת של המסוע:

החורים הגדולים בפרופיל הם 0.5", אז מיסבים עם קוטר חיצוני של 0.5" יתאימו:

ובתור מסוע עצמו רציתי להשתמש בצינורות אלומיניום:

רוחב הקופסה הגדולה הוא 24 ס"מ, אז צינור באורך 10.0" (254 מ"מ) ובקוטר של 1" אמור להתאים מצויין.
תכננתי גם מתאם קטן שיכנס לצינור מהצדדים ויוכל להכנס לחור הפנימי של המיסב (0.25"). מתאם כזה אפשר יהיה להדפיס במדפסת תלת מימד או לייצר מאלומיניום בבית מלאכה כלשהו. הרכבתי את הכל ב-OnShape וזה מה שיצא:
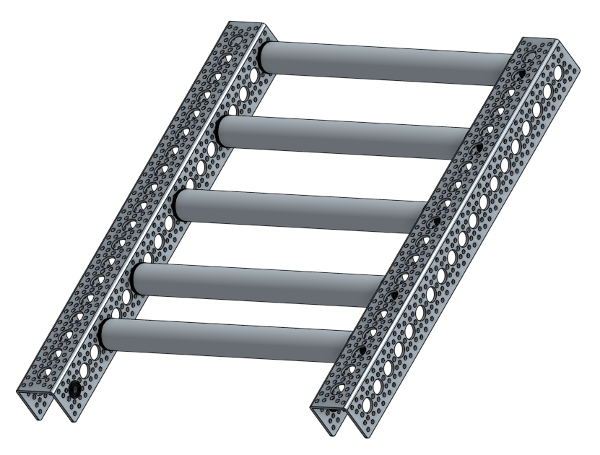
אחרי שהרכבתי את המבנה הזה מדדתי את הרוחב ויצא 34.1 ס"מ מה שגדול מדי כי כמעט ולא ישאר מרווח בין רגלי המדפים לרובוט. וזה עוד לפני שיש את החל התחתון שלו עם הגלגלים. גם אם הגלגלים יהיו פנימיים, זה עדיין רחב מדי.
הייתי יכול לחשב את זה עוד לפי שאני מרכיב את הכל ב-OnShape כמובן, אבל רציתי להתאמן קצת במסכי ה-Assembly שלהם כדי לראות איך זה הולך, בסופו של דבר זו הפעם הראשונה שאני משתמש במערכת שלהם.
בקיצור, צריך להיות הרבה יותר שמרני ברוחב...
כמה כיוונים שחשבתי עליהם בינתיים:
במקום הפרופילים של 1.50" להשתמש בלוחות מחוררים. אין באורך של 15", אבל אפשר לקחת 2 של 7.5" ולחבר ביניהם:

זה לא ישאר כזה שטוח בצדדים כי הברגים יבלטו קצת וגם חיבור של מנוע למסוע כנראה יקח 1-2 ס"מ (מיד אסביר למה אני חושב שצריך את זה). אז אם רוחב הפרופיל 1.50" הוא 3.8 ס"מ, נניח אחסוך 2 ס"מ בצד שלא יהיה חיבור מנוע ועוד 1 ס"מ בצד שיהיה, כך שרוחב הרובוט יהיה כ-31 ס"מ שזה בסדר, אבל די גבולי...
הכיוון השני שחשבתי עליו יצריך ייצור של רכיבים מיוחדים ובינתיים השתדלתי להימנע מזה ולהשתמש במה שיש, אבל יכול להיות שלא תהיה ברירה.
בתאכלס אני לא ממש צריך מסוע כל כך רחב, מספיק גם 20 ס"מ כדי שיהיה בסיס מספיק רחב שיוכל לתמוך בקופסה, אבל בצורה הזו צריך שהדפנות שמחזיקות את צינורות האלומיניום יהיו נמוכות יותר מהצינורות, אחרת הן יפריעו. רוחב הפרופילים שרציתי להשתמש בהם וגם הלוחות ומחוררים הוא 1.50", קוטר הצינורות הוא 1.0", כך שהפרופיל והלוח בולטים. אפשר יהיה לחתוך את הלוח המחורר או לייצר משהו דומה מפלסטיק...
חזרה למנוע של המסוע...
חשבתי על שרשרת הפעולות שעוברות על הקופסה:
עגורן מוציא את הקופסה מהמדפים עם הידית שבקדמת הקופסה, מוריד אותה למטה ומכניס אותה על המסוע של הרובוט. במקרה הזה לא צריך מנוע כי העגורן דוחף את הקופסה על הרובוט ומספיק שהצינורות של המסוע יסתובבו כדי לא להקשות על ההכנסה.
כשרובוט מביא את הקופסה למעלית של השולחן שציירתי בפוסט הקודם, הקופסה מועברת למעלית מהצד האחורי שלה כדי שהיא תהיה עם הפנים למפעיל, כך שגם אם המעלית היתה פועלת באותה הצורה כמו העגורן, לא היה לה איפה לתפוס את הקופסה מאחורה כדי למשוך אותה. בגלל זה הרובוט צריך איך שהוא לדחוף את הקופסה לכיוון המעלית...
מה שחשבתי לעשות הוא לחבר מנוע DC לצינור אחד של המסוע ולמתוח גומיה רחבה על כל הצינורות, כך שצינור אחד יסובב את כל השאר ויוכל למשוך או לדחוף את הקופסה שמעל. ההתנגדות של המנוע תחזיק שהמסוע לא יזוז תוך כדי הנסיעה כדי שהקופסה לא תיפול.
בזמן שאני כותב את זה, חשבתי על מנגנון אחר שאולי יפשטו את העניין: הצינורות של המסוע יסתובבו חופשי, אבל יהיה איזה שהוא מנגנון משני צידי המסוע שיוכל לדחוף את הקופסה החוצה כשצריך. משהו כמו זרוע על מנוע סרוו שתעלה ותדחוף תוך כדי סיבוב. המנגנון צריך לאפשר תנועה חופשים מעליו כי הקופסאות יכולות להטען ולרדת מהרובוט משני הצדדים שלו... אותו מנגנון יוכל גם להחזיק את הקופסה כדי שלא תעוף מהמסוע תוך כדי נסיעה... צריך לחשוב על זה עוד קצת...
קודם כל, מדדתי את המרווחים בין הרגליים של המדפים, שם הייתי רוצה שהרובוטים יסתובבו וזה מה שיצא:
לרוחב יש בערך 36 ס"מ, לגובה עד למקום בו הקופסה הרחבה נוגעת יש כ-25 ס"מ.
גובה הקופסה הוא 10 ס"מ, כך שגובה הרובוט צריך להיות פחות מ-15 ס"מ.
אני רואה את הרובוט כמסוע מלמעלה, אליה יטענו הקופסאות ע"י העגורנים או מעלית, מלמטה אמורים להיות 2 גלגלים בצדדים ו-2 גלגלים כל כיווניים מקדים ואחורה כדי לתמוך בקופסה הארוכה.
התחלתי לתכנן קודם את החלק העליון, ממנו נגזר הרוחב של הרובוט...
אורך הקופסאות הוא 40 ס"מ, אז רציתי להשתמש בשני פרופילים מסדרת Actobotics באורך 15.0" (381 מ"מ) כאלה כמסגרת של המסוע:
החורים הגדולים בפרופיל הם 0.5", אז מיסבים עם קוטר חיצוני של 0.5" יתאימו:
ובתור מסוע עצמו רציתי להשתמש בצינורות אלומיניום:
רוחב הקופסה הגדולה הוא 24 ס"מ, אז צינור באורך 10.0" (254 מ"מ) ובקוטר של 1" אמור להתאים מצויין.
תכננתי גם מתאם קטן שיכנס לצינור מהצדדים ויוכל להכנס לחור הפנימי של המיסב (0.25"). מתאם כזה אפשר יהיה להדפיס במדפסת תלת מימד או לייצר מאלומיניום בבית מלאכה כלשהו. הרכבתי את הכל ב-OnShape וזה מה שיצא:
אחרי שהרכבתי את המבנה הזה מדדתי את הרוחב ויצא 34.1 ס"מ מה שגדול מדי כי כמעט ולא ישאר מרווח בין רגלי המדפים לרובוט. וזה עוד לפני שיש את החל התחתון שלו עם הגלגלים. גם אם הגלגלים יהיו פנימיים, זה עדיין רחב מדי.
הייתי יכול לחשב את זה עוד לפי שאני מרכיב את הכל ב-OnShape כמובן, אבל רציתי להתאמן קצת במסכי ה-Assembly שלהם כדי לראות איך זה הולך, בסופו של דבר זו הפעם הראשונה שאני משתמש במערכת שלהם.
בקיצור, צריך להיות הרבה יותר שמרני ברוחב...
כמה כיוונים שחשבתי עליהם בינתיים:
במקום הפרופילים של 1.50" להשתמש בלוחות מחוררים. אין באורך של 15", אבל אפשר לקחת 2 של 7.5" ולחבר ביניהם:
זה לא ישאר כזה שטוח בצדדים כי הברגים יבלטו קצת וגם חיבור של מנוע למסוע כנראה יקח 1-2 ס"מ (מיד אסביר למה אני חושב שצריך את זה). אז אם רוחב הפרופיל 1.50" הוא 3.8 ס"מ, נניח אחסוך 2 ס"מ בצד שלא יהיה חיבור מנוע ועוד 1 ס"מ בצד שיהיה, כך שרוחב הרובוט יהיה כ-31 ס"מ שזה בסדר, אבל די גבולי...
הכיוון השני שחשבתי עליו יצריך ייצור של רכיבים מיוחדים ובינתיים השתדלתי להימנע מזה ולהשתמש במה שיש, אבל יכול להיות שלא תהיה ברירה.
בתאכלס אני לא ממש צריך מסוע כל כך רחב, מספיק גם 20 ס"מ כדי שיהיה בסיס מספיק רחב שיוכל לתמוך בקופסה, אבל בצורה הזו צריך שהדפנות שמחזיקות את צינורות האלומיניום יהיו נמוכות יותר מהצינורות, אחרת הן יפריעו. רוחב הפרופילים שרציתי להשתמש בהם וגם הלוחות ומחוררים הוא 1.50", קוטר הצינורות הוא 1.0", כך שהפרופיל והלוח בולטים. אפשר יהיה לחתוך את הלוח המחורר או לייצר משהו דומה מפלסטיק...
חזרה למנוע של המסוע...
חשבתי על שרשרת הפעולות שעוברות על הקופסה:
עגורן מוציא את הקופסה מהמדפים עם הידית שבקדמת הקופסה, מוריד אותה למטה ומכניס אותה על המסוע של הרובוט. במקרה הזה לא צריך מנוע כי העגורן דוחף את הקופסה על הרובוט ומספיק שהצינורות של המסוע יסתובבו כדי לא להקשות על ההכנסה.
כשרובוט מביא את הקופסה למעלית של השולחן שציירתי בפוסט הקודם, הקופסה מועברת למעלית מהצד האחורי שלה כדי שהיא תהיה עם הפנים למפעיל, כך שגם אם המעלית היתה פועלת באותה הצורה כמו העגורן, לא היה לה איפה לתפוס את הקופסה מאחורה כדי למשוך אותה. בגלל זה הרובוט צריך איך שהוא לדחוף את הקופסה לכיוון המעלית...
מה שחשבתי לעשות הוא לחבר מנוע DC לצינור אחד של המסוע ולמתוח גומיה רחבה על כל הצינורות, כך שצינור אחד יסובב את כל השאר ויוכל למשוך או לדחוף את הקופסה שמעל. ההתנגדות של המנוע תחזיק שהמסוע לא יזוז תוך כדי הנסיעה כדי שהקופסה לא תיפול.
בזמן שאני כותב את זה, חשבתי על מנגנון אחר שאולי יפשטו את העניין: הצינורות של המסוע יסתובבו חופשי, אבל יהיה איזה שהוא מנגנון משני צידי המסוע שיוכל לדחוף את הקופסה החוצה כשצריך. משהו כמו זרוע על מנוע סרוו שתעלה ותדחוף תוך כדי סיבוב. המנגנון צריך לאפשר תנועה חופשים מעליו כי הקופסאות יכולות להטען ולרדת מהרובוט משני הצדדים שלו... אותו מנגנון יוכל גם להחזיק את הקופסה כדי שלא תעוף מהמסוע תוך כדי נסיעה... צריך לחשוב על זה עוד קצת...
www.4project.co.il
כל הרכיבים לפרוייקט שלכם
כל הרכיבים לפרוייקט שלכם