תכירו מנועי סרוו דיגיטליים בחיבור טורי!
יצרן המנועים Feetech השיק כבר לפני די הרבה זמן כמה סדרות של מנועים שמתקשרים בצורה הזו.
בהתחלה, כשראיתי את הקונספט, די התלהבתי, אבל לא מיהרתי להביא את המנועים האלה לארץ, כי חשבתי שתפעול שלהם מסובך מדי ורציתי לראות איך זה יתפתח.
בתקופה האחרונה בחור בשם אופיר עוזרי נדנד לי מספיק כדי לגרום לי להתחיל להביא אותם לארץ. אפשר ליצור איתו קשר ב-X או בפייסבוק.
אופיר מנסה לקדם בארץ קהילה שבונה ומשתמשת בזרועות רובוטיים לצרכים שונים. הנה פרוייקטים שהוא משתתף בהם ב-GitHub: lerobot, SO-ARM100. מנועים הטוריים האלה הם כמו כפפה ליד (הרובוטית).
מה השוני ממנועי PWM הרגילים?
מנועי סרוו "הרגילים" שאנחנו מכירים, עם שליטה ע"י פולס PWM הגיעו מתחום הטיסנים ומודלים של מכוניות וסירות נשלטות מרחוק. אות ה-PWM הגיע ממקלטי רדיו לשליטה על הטיסן/מודל. היה הרבה יותר פשוט לשדר נדנוד של קו מאשר להעביר הודעות בין המשדר למקלט. גם מיקרובקרים כמו הארדואינו יכולים לייצר את אות ה-PWM כדי לשלוט על תנועת המנוע.לעומתם, ערוץ התקשורת שעובר בין כל המנועים מעביר הודעות דיגיטליות של ממש. הודעות אלה לא רק אומרות למנוע לאיזו זווית לזוז, אלא יכולות לשנות את מהירות התנועה, תאוצות, לשנות מצבי עבודה, לקבוע את נקודת האפס וגם... לקבל מידע מהמנוע! כן, כן... הערוץ הוא דו-כיווני!
איזה מידע אפשר לקבל? מיקום הציר (זווית), מהירות הסיבוב, מתח כניסה, זרם, עומס, וטמפרטורה.
המנוע הפך להיות הרבה יותר חכם. הרבה הרבה יותר!
העובדה שאפשר לקבל את מיקום ציר המנוע בכל רגע, מאפשר לעקוב אחרי תנועת המנוע, להקליט את התנועות ו"לנגן" אותן אחרי זה כדי לבצע את אותה הפעולה שוב.
אפשר גם להשתמש במנוע בצד אחד לקלט תנועות שנשלחות למנוע אחר כדי שיבצע את אותה התנועה, מה שאומר שאפשר לייצר זרועות ששולטות מרחוק על זרועות אחרות. זה בדיוק מה שאופיר עשה. חפשו בגוגל "so100 arm" כדי להתרשם ממה שאנשים עושים בתחום זה. הנה טעימה:
וזה לא הכל!
עם מנועי הסרוו הרגילים אתם שולטים על זווית הזרוע. בדרך כלל טווח התנועה יהיה באיזור ה-180 מעלות. יש כאלה שיכולים לעשות קצת יותר.
יש מנועים שיכולים לעשות כמה סיבובים לכל כיוון, על חשבון הדיוק בזווית.
יש גם מנועים מיוחדים שיכולים לבצע סיבוב רציף, כך שלמעשה הם מתנהגים כמו מנוע DC עם בקר פנימי, שאתם שולטים על כיוון והמהירות שלהם ולא על זווית הציר.
ל-Feetech יש מנועים שאפשר לשנות את צורת הפעולה שלהם בין שני המצבים: זווית או תנועה רציפה.
ומה קורה בעולם המנועים החכמים החדשים?
מנועים שמבוססים על פוטנציאומטר לחיווי על זווית הציר מתנהגים די דומה למנועים שאפשר לשנות להם את צורת העבודה (זווית או רציף).
אבל אם נסתכל על המנוע מדגם ST-3215 נגלה כמה מצבי עבודה נוספים ומעניים. מנוע זה מבוסס על מקודד מגנטי, כך שאין לו מגבלת זווית שאפשר למדוד ע"י פוטנציאומטר. המנוע מודע למיקום הציר בכל טווח ה-360 מעלות. רזולוציית המקודד היא 12bit, כך ש-360 מעלות מחולקים ל-4095 איזורים, שמאפשרים דיוק של 0.088 מעלה!
תוסיפו לזה שהבקר הפנימי שלו דיגיטלי, שיכול לחשב ולספור דברים ומקבלים מצבי עבודה חדשים ומאוד מעניינים באותו המנוע:
- אפשר לקבוע את נקודת האפס של המנוע
- מצב תנועת זווית הרגיל
- מצב של מספר סיבובים, כלומר להגדיל את ה-360 מעלות סיבוב לכמעט כל ערך שתרצו
- מצב סיבוב רציף בו אתם שולטים על הכיוון ומהירות התנועה, כמו מנוע DC
- מצב תנועה בצעדים, כמו מנוע צעד. אפשר לקבוע שכל צעד יהיה 15 מעלות למשל
- מנוע יכול לנסות לשמור על מהירות קבוע כשיש עומס על הציר, או להאט את התנועה
- אפשר לקבוע את התאוצות בהתחלה וסוף התנועה כדי להחליק אותה
סרטון זה מדגים את רוב המצבים האלה:
מנועים לרובוטיקה
זה לא שהמנועים "הישנים" לא מתאימים לרובוטיקה. Feetech מייצרים גם מנועים טוריים שנראים כמו מנועים שאנו רגילים אליהם, אבל מתקשרים דרך הערוץ הטורי. למשל אלה:אבל לרוב המנועים החדשים יש צורה פיזית קצת שונה. יש להם ציר שני בצידו האחורי של המנוע שנועד לתמיכה בהתקנה ומותאם במיוחד לפרוייקטים רובוטיים:
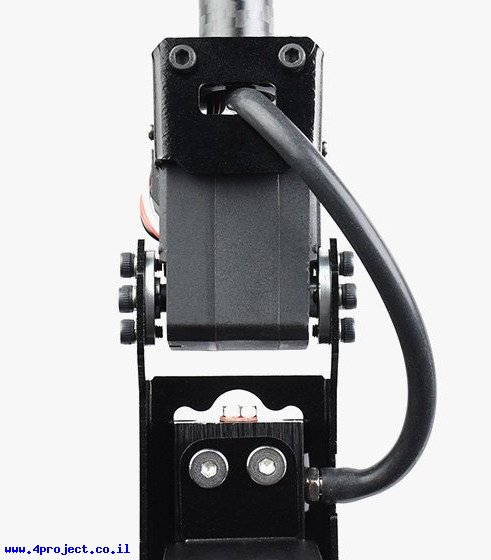
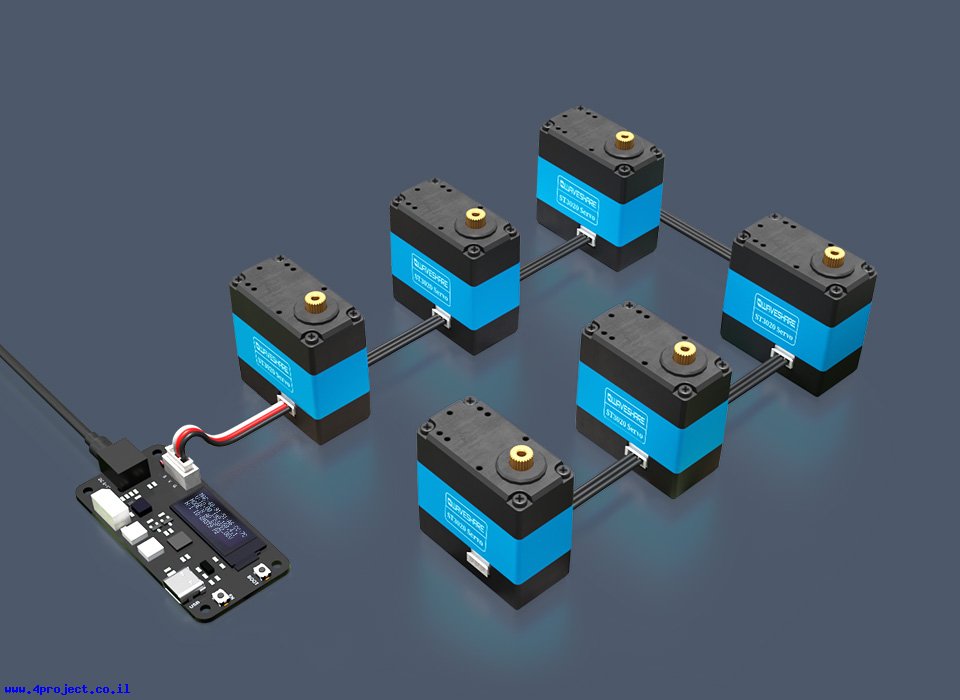
מבנה זו של המנוע מאפשר חיבור נוח יותר של אחד לשני כדי לבנות פלטפורמות רובוטיות, כמו אלה:


מתח עבודה שונה
טווח מתח העבודה של המנועים החדשים הוא הרבה יותר רחב מהמנועים הרגילים. יש מנועים רגילים שיעבדו במתח של 7.4V או אפילו 8.4V, אבל אלה נחשבים למיוחדים בתחום.למנועים החדשים הטווח הרבה יותר גדול. יש אפילו גרסאות של אותו המנוע לתחום מתחים שונה. למשל יש דגם ST-3215 שמיועד למתח של 12V, אבל טווח העבודה שלו הוא בין 4V ל-14V, ויש גם דגם ST-3215 שמיועד למתח של 7.4V, אבל טווח עבודה שלו הוא בין 5.5V ל-14V. יש גם דגם ST-3020 שמיועד למתח של 7.4V, אבל טווח העבודה שלו גם הוא בין 5.5V ל-14V.
טווחי עבודה אלה מאפשרים להפעיל את המנועים גם מסוללות שונות (סוללות 2S מספקות 7.4V, סוללות 3S מספקות 11.1V), או מספק מתח של 6V או 12V.
איך מתקשרים עם המנועים?
Feetech מחלק את המנועים הטוריים לשני סוגים: סדרות SC ו-ST המתקשרות בצורת TTL (ככה הם קוראים לזה) וסדרת SM המתקשרת דרך ערוץ RS485.ערוץ ה-TTL הוא למעשה UART במתח גבוה (מתח העבודה של המנוע). אל תנסו לתקשר עם מנועים אלה ישירות מקווי המיקרובקר. קווים אלה דורשים המרת מתח יחיסית פשוטה כדי לתקשר עם המנועים.
כרגע יש שלושה יצרנים שמספקים מתאמים/בקרי מנוע טורי: Feetech עצמם, WaveShare וגם SeeedStudio:
שלושתם עושים פחות או יותר את אותו הדבר. דרך הרכיבים האלה אפשר לתקשר עם מנועי TTL מערוץ UART של מיקרובקרים שונים, או דרך חיבור USB. צריך יהיה לשנות או להלחים גשרונים על המעגל כדי לשנות את מצב העבודה.
שימו לב שלכל אחד מהמתאמים האלה יש טווח מתחי עבודה שונים. בחרו את המתאם המתאים למתח של המנועים שתעבדו איתם.
מתאם של Feetech יכול לתקשר גם עם מנועי TTL וגם עם מנועי RS485. שני המתאמים האחרים יכולים לתקשר רק עם מנועי TTL.
לכל מנוע בערוץ התקשורת צריך להיות מזהה ID יחודי כדי שאפשר יהיה לפנות אליו ספציפית.
כל המנועים מגיעים מהיצרן עם אותו המזהה, כך שצריך לחבר כל אחד בנפרד ולצרוב לו את ה-ID שתרצו שיהיה לו.
סרטון הבא מראה איך עושים את זה:
בתאוריה אפשר לחבר עד 253 מנועים לערוץ תקשורת אחד, אבל בפועל מה שיקבע את כמות המנועים יהיה הזרם שתוכלו לספק ואורך הקווים.
היצרן לא מספק את אורך הקווים המקסימלי לחיבור מנועי ה-TTL כי הוא מושפע מהרבה דברים. הערכה שלי היא שאחרי מטר או 2 התקשורת תהיה לא כל כך יציבה.
מנועים שמתקשרים דרך ערוץ ה-RS485 יהנו מיכולות הפרוטוקול הזה ויוכלו לתקשר עד 1200 מטר. מניח שמנועים אלה מיועדים לתעשיה והמחירים שלהם יהיו בהתאם.
אז מה דעתכם על המנועים הטוריים? כבר בניתם משהו איתם? האם יוכלו לספק לכם פתרון לבעיה קיימת?
אשמח לתגובות לפוסט בפייסבוק.