על כל הנושאים האלה נסביר במדריך זה, המתמקד במוצרים המוצגים במחלקת המנועים באתר www.4project.co.il.
המחלקה הראשית מחולקת לתתי מחלקות לפי סוג המנוע, גודל פיזי למנועי DC, ולפי יצרן למנועי סרוו. ישנן גם תתי מחלקות של אביזרים שכנראה שתצטרכו לעבודה עם המנועים.
כוח המנוע
לפני שנצלול להסברים על סוגי המנועים השונים, נסביר קודם על המשותף ביניהם: יחידות הכוח של מנוע המבצע תנועה סיבובית ומה המשמעות שלהן.לכל המנועים באתר מצויין הכח שלהם ביחידות של ק"ג ל-ס"מ (kg-cm). באתרים אחרים אתם יכולים להיתקל באותו הנתון ביחידות אימפריות של oz-in. המשמעות היא זהה, תוכלו למצוא הרבה מחשבוני המרה בין היחידות, חפשו בגוגל משהו כמו "convert oz-in to kg-cm".
מה שהיחידות האלה אומרות זה שאם תחברו זרוע באורך של 1 ס"מ לציר המנוע, "תיאורטית" המנוע אמור להיות מסוגל להחזיק את המשקל ב-ק"ג שרשום במפרט. החישוב הוא לינארי, תאריכו את הזרוע ל-2 ס"מ, אז המשקל ירד בחצי. 3 ס"מ - שליש משקל וכו'.
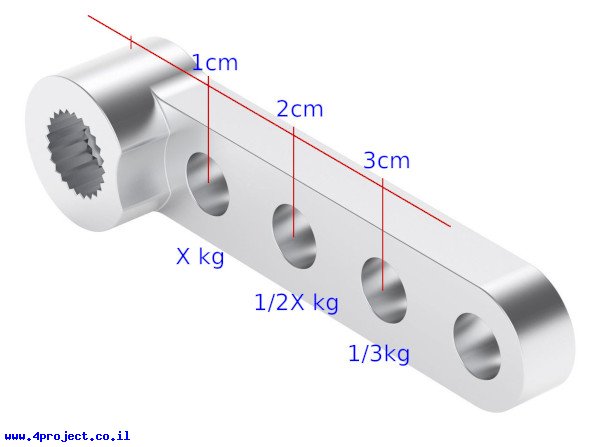
אפשר להשתמש בחישוב זה גם לגלגלים ואביזרי מכניקה אחרים כמובן. בואו נקח כדוגמה גלגל Rhino בקוטר 120 מ"מ שמחובר ישירות למנוע DC זה, בעל כוח של 133.2 kg-cm.
בשונה לזרוע שיחזיק את המשקל במרחק מסויים ממרכז הציר, הגלגלים יעבירו את הכוח בנקודה בה הם נוגעים למשטח עליו הם נוסעים, שזה במרחק של רדיוס הגלגל ממרכז ציר המנוע, כלומר חצי קוטר, שזה 60 מ"מ, או 6 ס"מ. מה שאומר שעם מנוע שבחרנו וגלגל של 120 מ"מ מחובר ישירות לציר המנוע, נוכל לקבל כוח של 133.2 ק"ג חלקי 6, שזה 22.2 ק"ג.
האם זה אומר שזה המשקל המקסימלי של הרכב שהשילוב של המנוע והגלגל יוכלו להניע? ממש לא! הנתון הזה יהיה תלוי במשטח עליו הגלגלים נוסעים, צמיגות, שיפוע, רוח ועוד המון מאפיינים שונים…
הדרך הפשוטה לדעת איזה כוח אתם צריכים מהמנועים היא למשוך את הרכב עם משקל יד אנלוגי. המשקל המקסימלי שתראו שם, זה פחות או יותר הכוח שצריך מהשילוב של המנועים, תמסורת והגלגלים כדי להניע את הרכב.
מנועי DC
מנוע DC הוא רכיב אלקטרו-מכני המייצר תנועה סיבובית כשמספקים לו מתח DC (מתח ישר). יש הרבה מאוד גדלים של מנועים כאלה באתר, לכן חילקנו אותם לתתי מחלקות בעיקר לפי הגודל הפיזי (הקוטר) של המנוע, או יותר נכון של תיבת ההעברה שלו. נסביר על תיבת העברה, או הגיר, בהמשך. יש מנועים קטנים מאוד, בקוטר של עיפרון סטנדרטי, ויש מנועים מאסיביים שיכולים להניע רובוטים ששוקלים עשרות קילו.
ישנן גם כמה תתי מחלקות המאפיינות סוגי מנועים קטנים, כמו מנועי חובבים ומנועי מיני עם הצורה הייחודית שלהם, מנועי מיקרו שמגיעים בגודל די סטנדרטי ומנועי Tamiya, שזהו יצרן ערכות רובוטיקה למתחילים עם מנועים מותאמים במיוחד לערכות אלה.
שימוש עיקרי
מנועי DC מייצרים תנועה סיבובית והשימוש העיקרי שקופץ לראש הוא להניע גלגלים של מכונית או פלטפורמה אחרת. אבל השימוש בהם לא מוגבל רק למטרה זו. מנוע סרוו ומנוע לינארי, שנסביר עליהם בהמשך, הוא מקרה פרטי של מנוע DC. אפשר לחבר למנוע גלגל שיניים עם שרשרת כדי לייצר מנוף להרמת דברים. אפשר לחבר בורג הנעה (Lead screw) כדי להמיר את התנועה הסיבובית לקווית (שזהו מימוש של מנוע לינארי). גם שימוש ברצועת תזמון יאפשר לכם לקבל תנועה קווית.מנועי Brushed
מנועי DC באתר הם Brushed Motors, אלא אם צויין אחרת. בצורה מופשטת זה אומר שהמגנט הקבוע מורכב כחלק הסטטי (Stator) של המנוע והחלק שמסתובב (Rotor) הם סלילים של אלקטרומגנט שמשנה את הקוטביות שלו כדי לייצר את הסיבוב. השינוי של הקוטביות מתבצע ע"י מברשות (Brushes) קבועות שמחליקות על מגעים שמסתובבים יחד עם הרוטור. מכאן השם - Brushed Motor - מנוע בעל מברשות.למנועי Brushless הסידור הוא הפוך, החלק המסתובב (Rotor) הוא מגנט והסלילים של האלקטרומגנט מותקנים כחלק הקבוע (Stator). כדי להפעיל מנוע Brushless צריך בקר מנוע מיוחד שיודע למתג את הסלילים בקצב מסוים כדי לגרום לרוטור להסתובב בכיוון והמהירות הרצויים. למנועים Brushless אין צורך במברשות כדי לשנות את הקוטביות של הסלילים, מכאן השם שלהם - Brushless motors - מנועים ללא מברשות. אפשר להגיד שמנועי Brushless הם יותר מודרניים, אבל קצת יותר מסובכים לתפעול.
אספקת מתח ושליטה
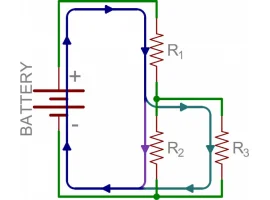
למנועי DC יש שני קווים אליהם צריך לספק מתח DC בהתאם לדרישות היצרן. מחברים פלוס לקו אחד ומינוס/אדמה לקו השני והמנוע מסתובב לכיוון אחד. הופכים את החיבורים והמנוע מסתובב לכיוון השני.אם כל מה שאתם צריכים זה להפעיל את המנוע בצורה ידנית שיסתובב לכיוון אחד, מספיק לחבר מפסק ON/OFF פשוט שיפסיק ויחבר את המתח.
אם אתם צריכים גם לשלוט על כיוון הסיבוב בצורה ידנית, אפשר להשתמש במפסק DPDT בחיבור מוצלב.
שליטה על מהירות המנוע קצת יותר מסובכת מזה. המחשבה הראשונה שיכול להיות שתקפוץ לכם לראש היא לספק מתח נמוך יותר, מה שיכול לעבוד, אבל אספקה של מתח נמוך יותר מורידה גם את המהירות וגם את הכוח של המנוע… יכול להיות שתחשבו לחבר נגד משתנה בטור למנוע כדי להוריד את המתח, זה רעיון לא כל כך מוצלח כי מנועים צורכים די הרבה זרם, מה שאומר שצריך נגד משתנה ממש גדול, כזה שיוכל לספוג הספק חשמלי מאוד גדול שיתפתח עליו.
מה שעושים כדי להוריד את המהירות מבלי לאבד את הכוח של המנוע, זה מספקים את המתח בפולסים, בצורת PWM. אם מחזוריות של אות ה-PWM היא 50%, כלומר חצי מהזמן המנוע מקבל מתח וחצי מהזמן לא, אז חצי מהזמן הוא פועל בכוח מלא וחצי מהזמן קצת בולם, מה שמקטין את מהירות הסיבוב, אבל עדיין מספק כוח מלא במקטעים של אספקת מתח. הפולסים האלה כל כך מהירים שלא תרגישו רעידות או קטיעות בסיבוב.
אספקה של המתח בפולסים בדרך כלל מתבצעת ע"י מיקרובקר, או שבב אחר המסוגל לייצר אותות PWM. מיקרובקרים או שבבים המייצרים את הפולסים לא יכולים לספק את הזרם הדרוש למנועים כדי לפעול, לכן דרוש רכיב נוסף המסוגל למתג זרמים גבוהים במהירות. טרנזיסטור MOSFET הוא רכיב מושלם בשביל זה. מיקרובקר מספק מתח בקרה נמוך לטרנזיסטור, שבתגובה ממתג מתח וזרם גבוהים שמסופקים למנוע.
ומה אם רוצים לשלוט עם מיקרובקר גם על הכיוון של המנוע ולא רק על המהירות? בשביל זה צריך 4 טרנזיסטורים המחוברים בצורה הנקראת H-Bridge.
הנושא הזה הולך ומסתבך, אבל אל דאגה, יצרני השבבים פתרו את הבעיה הזו ע"י שבבים ייעודיים שעושים את כל זה באריזה קטנה מאוד. שבבים או כרטיסים כאלה נקראים בקרי מנוע DC, או באנגלית Motor Drivers. הם בנויים לקבל פיקוד ממיקרובקר או ממקורות אחרים ולספק למנועים את המתח והזרם הדרושים כדי להניע אותם בכיוון ובמהירות הנכונים. הבקרים הייעודיים הרבה יותר חכמים מסתם חיבור של טרנזיסטורים. חלקם יכולים לשלוט על התאוצה והבלימה של המנוע, חלקם כוללים חיישני זרם שיכולים לתת לכם חיווי של העומס על המנוע, חלקם יכולים לטפל במקודדים (Encoders) שנסביר עליהם בהמשך וזו לא הרשימה המלאה של כל מה שבקרי מנוע משוכללים יכולים לעשות...
צריכת זרם
מנועים הם זוללי זרם ידועים וצריך לדאוג לספק את הרעב שלהם כדי שיוכלו לפעול בכל הכוח.בנתוני המנוע בדרך כלל תמצאו שני נתונים: זרם סיבוב חופשי (No load current) וזרם תקיע (Stall current). זרם סיבוב חופשי הוא הזרם אותו צורך המנוע כשלא מופעל עליו שום עומס, אפשר להגיד שזה הזרם המינימלי שצריך לספק כדי שהמנוע יסתובב ויספק כוח מלא. זרם תקיעה הוא הזרם המקסימלי שהמנוע יצרוך וזה קורה כשהציר נתקע. רצוי לבחור בקר מנוע וגם מקור מתח שיוכלו לספק את הזרם המקסימלי הזה, ואולי אפילו קצת יותר. לרוב המחשבה היא שלא מגיעים לזרם תקיעה אף פעם, אבל זה לא ממש נכון. רובוט פשוט בצורת מכונית שנתקע בקיר תוקע גם את המנוע לפרק זמן כלשהו...
בצד של בקר מנוע DC תמצאו שני נתונים שקשורים לזרם: זרם מקסימלי רציף (Constant current) וזרם מקסימלי רגעי (Peak current). לזרם הרגעי בדרך כלל מוגדר גם זמן המציין כמה זמן הבקר יוכל לספק את הזרם הגבוה ביותר שהוא יוכל, לפני שיכנס למצב מגננה כלשהו (כי הוא מתחמם מאוד בפרק זמן זה). הבחירה בבקר מנוע מתאים תלויה מאוד בצרכים שלכם. מאוד יכול להיות שהזרם הרציף שהבקר יספק לא צריך להיות מעל זרם התקיעה של המנוע, אלא לספק רק את הצרכים הרגילים (נסיעה רגילה של הרובוט), אבל הזרם הרגעי שהבקר יוכל לספק צריך בהחלט להיות מעל זרם התקיעה כדי שלא ישרף במקרה של תקיעה של המנוע, גם אם היא קצרה מאוד, כמו התנגשות בקיר.
זרם הוא נתון חשוב כשבוחרים סוללות לפרוייקט נייד. צריכת זרם גבוהה תרוקן את הסוללה מהר יותר. מכיוון שהמנועים הם הצרכן הגדול ביותר של הזרם בפרוייקטים ניידים, חשוב לשים דגש על הבחירה הנכונה של המנועים וגם הפעלה שלהם. תאוצות גבוהות דורשות יותר כוח ויותר זרם. העלאת מהירות הדרגתית יכולה לחסוך זרם ולהאריך את זמן העבודה של הפרוייקט בין טעינות הסוללה.
תיבת העברה - הגיר
הצורה בה מנוע Brushless DC בנוי יגרום לו לרצות להסתובב במהירות המקסימלית שהוא יוכל וזו מהירות מאוד גבוהה. עשרות אלפי סיבובים בדקה. במהירויות כאלה גבוהות המנועים בדרך כלל מאוד חלשים. מנוע פשוט זה מגיע ל-20,000 סיבובים לדקה (סל"ד) כשמחובר למתח של 3V ומספק כח של רק 55 גרם ל-ס"מ.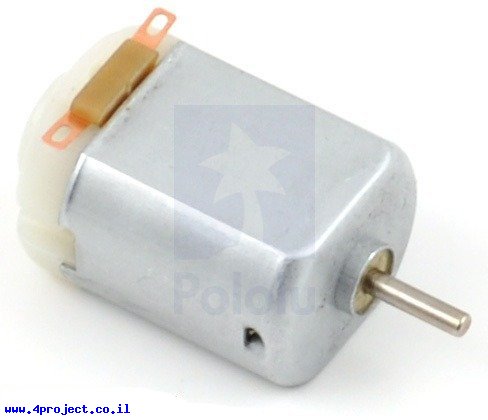
יש דברים מעניינים שאפשר לעשות עם 20 אלף סל"ד, אבל בדרך כלל נרצה הרבה פחות מזה. מה שעושים זה מצרפים למנוע ה-DC תיבת תמסורת המורידה את המהירות ומעלה את הכוח שנוכל לקבל מהמנוע. לפעמים מכנים תיבה זו גם כ-"גיר" שמגיע מהשם של התיבה באנגלית: Gear Box. לסדרת מנועי המיקרו למשל, אפשר לראות את גלגלי השיניים של תיבת התמסורת מכיוון שהם מגיעים חשופים כדי להשאיר את גודל המנועים האלה קטן עד כמה שאפשר (לא סתם קוראים להם מיקרו). בתמונות השונות אפשר לראות כמות גלגלי שיניים שונה, המייצרים יחס העברה שונה:


יחס העברה הוא סכום של כל היחסי העברה בין גלגלי השיניים בתיבה. לגלגל שיניים בעל 10 שיניים המחובר ישירות לגלגל בעל 50 שיניים יש יחס של 1:5 (אחד ל-חמש). מה שאומר שאם המנוע מסובב את הגלגל הקטן, הגלגל הגדול יסתובב פי 5 לאט יותר ומספק כוח תיאורטי פי 5 גדול יותר ממה שהיה אפשר לקבל ישירות מהמנוע (נסביר בהמשך למה תיאורטי). בפועל יש סדרה של גלגלי שיניים המחוברים אחד לשני ומספקים יחס העברה מסויים. למעשה, באותה סדרת המנועים יש אותו מנוע DC לכל הדגמים, מה ששונה זו תיבת העברה עם יחס העברה שונה לכל דגם. לדוגמה, למנוע מיקרו LP של 2500 סל"ד יש תיבה ביחס של 1:5 ולמנוע מיקרו LP של 13 סל"ד יש תיבת ביחס של 1:1000, אבל לשניהם יש את אותו מנוע DC. אפשר להכפיל את מהירות היציאה של המנוע ביחס התיבה כדי להבין שהמנוע עצמו מסתובב במהירות של 12,500 - 13,000 סל"ד.
יש שיטות שונות לבניית תיבת העברה. השיטה שרואים בתמונה של מנוע מיקרו, שבה יש סדרה של גלגלי שיניים שכל אחד מעביר את הכוח לגלגל הבא, קוראים Spur GearBox. בשיטה זו יש רק מקום מגע אחד בין כל שני גלגלי השיניים. שיטה אחרת, שמספקת יותר נקודות מגע בין הרכיבים, בדרך כלל 3 או 4, ובדרך כלל משתמשת בגלגלי שיניים גדולים יותר פיזית נקראת Planetary GearBox. תיבות העברה אלה יכולות להעביר הרבה יותר כח בזכות ריבוי נקודות ושטח המגע.
סרט זה מדגים את המבנה של שני סוגי התיבות:
שימו לב שביחסי העברה גבוהים צריך גלגלי שיניים גדולים יותר פיזית, או כמות גדולה יותר של גלגלי שיניים קטנים יותר, מה שאומר שצריך יותר מקום לגלגלי שיניים אלה, כך שתיבות העברה של מנועים עם יחס העברה גבוה יהיו ארוכות יותר מתיבות עם יחס העברה נמוך יותר:



ונקודה האחרונה בנוגע לתיבות ההעברה… למה הכוח שתוכלו לקבל הוא תיאורטי…
כמו שאתם מבינים, המוצא של המנוע הוא המוצא של תיבת ההעברה. בואו נניח שמנוע בלי התיבה יכול לספק 1 ק"ג ל-ס"מ. למנוע מחוברת תיבת העברה עם יחס של 1 ל-1000. אז בתיאוריה המוצא של המנוע עם התיבה צריך לספק כח סיבוב של 1000 ק"ג ל-ס"מ (טון!). בפועל, גלגלי השיניים ישברו הרבה לפני שהכוח יגיע למימדים אלה. תיבות עם יחסי העברה כל כך גבוהים טובים להורדת המהירות של המנוע והכוח המקסימלי שתוכלו לקבל מהמנוע יהיה תלוי בנקודת השבירה של גלגלי השיניים בתיבת ההעברה, כאשר הנקודה הזו בדרך כלל לא ידועה לנו. אפשר יהיה להגיד בבטחה שתיבת Planetary תהיה חזקה יותר מתיבת ה-Spur בגלל כל מה שתיארנו קודם, כך שאם אתם צריכים הרבה כוח, צריך גלגלי שיניים גדולים וחזקים יותר. אפשר כמובן לבנות כמה שלבי העברה בעזרת גלגלי שיניים חיצוניים למנוע ובכך להגדיל עוד יותר את הכוח שאפשר יהיה לקבל מהמכלול.
מקודד - Encoder
מקודד (Encoder באנגלית) הוא חיישן אלקטרוני שבדרך כלל מחובר לציר המנוע לפני תיבת ההעברה, כלומר הוא מודד את הסיבובים של המנוע עצמו, ולא של ציר יציאת המנוע. המקודד מספק מספר פולסים עם כל סיבוב של ציר המנוע. כמות הפולסים שונה בין דגמים שונים של המקודד. בדרך כלל תמצאו נתון שאומר כמה פולסים הרכיב נותן לסיבוב שלם. לדוגמה, מקודד תעשייתי זה מספק 1024 פולסים לסיבוב, מקודד מגנטי למנוע מיקרו מספק רק 12 פולסים לסיבוב.

יותר פולסים לסיבוב = יותר דיוק. זו גם הסיבה לחיבור המקודד לציר המנוע לפני תיבת ההעברה. למנוע כזה של 30 סל"ד יש תיבת העברה ביחס של 1:188 ומקודד שמספק 28 פולסים לסיבוב (המנוע לפני הגיר), כלומר תקבלו 5264 פולסים לסיבוב אחד של הציר היוצא מהמנוע. דיוק זה מעולה, אבל כדי להיות מסוגלים לטפל בכמות כל כך גדולה של פולסים צריך מיקרובקר מהיר, או בקר מנוע שיודע לטפל בהם בצורה חומרתית ויעילה יותר.
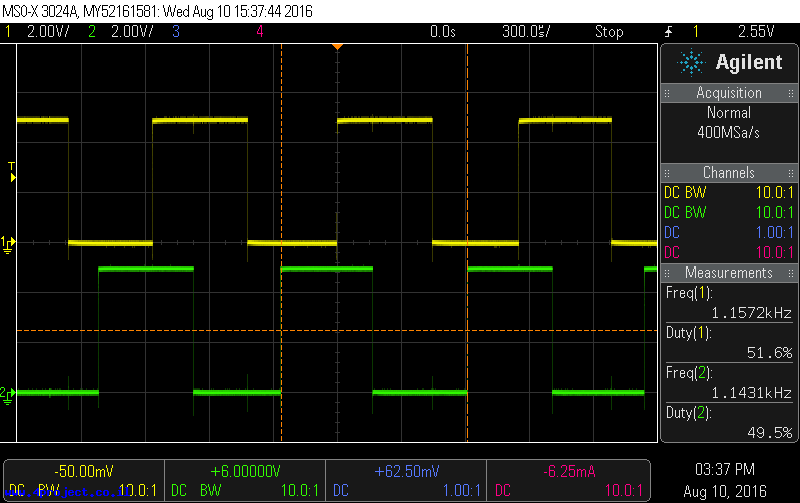
נדייק קצת את ההסבר הקודם… למקודדים בדרך כלל יש שני חיישנים (או אפילו יותר) המורכבים במרווח מסויים אחד מהשני (זווית שונה של סיבוב), כך שבעזרת פולסים מחיישנים שונים נוכל לקבל לא רק את המהירות של הסיבוב, אלא גם הכיוון שלו.
הפולסים מגיעים בפאזת מופע (Phase) מסוימת, כך שמעקב אחרי איזה פולס עלה קודם יציין את כיוון הסיבוב.
יש מגוון סוגי חיישנים שתוכלו למצוא בתוך המקודד, אבל לרוב תמצאו כאלה שפועלים על אור (פשוטים יותר) וכאלה שפועלים על שדה מגנטי (איכותיים יותר).


במקודדים הפועלים על אור יש רכיב שמסתובב על ציר המנוע ומאפשר לאור להגיע לחיישן דרך הפתחים שברכיב, כך שהחיישן סופר את כמות הפעמים שהוא רואה אור או חושך.
במקודדים הפועלים על שדה מגנטי יש דיסקית שמורכבת על ציר המנוע שבדרך כלל כוללת כמה מגנטים, כך שחיישני Hall Effect סופרים את כמות הפעמים שמגנט עבר לידם.
באתר תוכלו למצוא מנועי DC עם מקודד מובנה, כאלה שיש להם רק הכנה למקודד (יש ציר נוסף שיוצא מהמנוע לפני תיבת העברה, אליו אפשר לחבר מקודד), ויש כאלה שלא נועדו לחיבור מקודד כלל. במקרים כאלה אפשר לחבר מקודד חיצוני, אבל הוא יהיה מחובר לציר היציאה של תיבת העברה ולא לציר המנוע לפני התיבה.
מנועי סרוו
הבהרה: יש הרבה סוגים של מנועי סרוו. מנועי הסרוו שמופיעים באתר הם המנועים הפופולריים בתחום הטיסנים ומכוניות על שלט רחוק - RC Servo Motors.מנוע סרוו (Servo Motor) הוא מקרה פרטי של מנוע DC, עם בקר פנימי שמפעיל את המנוע בחוג סגור (נסביר בהמשך). מנועי סרוו באתר מחולקים לתתי מחלקות לפי היצרן. נהוג לסווג את המנועים האלה לפי משקל, למשל מנוע 9 גרם ומנוע 40 גרם, אבל זה לא מרגיש לנו נכון, כי מנוע עם גלגלי שיניים מתכתיים ישקול יותר ממנוע זהה בגודל עם גלגלי שיניים מפלסטיק. יש יצרנים שמחלקים את המנועים לפי הגודל הפיזי שלהם: ננו, תת-מיקרו, מיקרו, מיני, סטנדרטי, גדול, ענק וכו', אבל גם חלוקה זו לא זהה בין היצרנים ויש גם יותר מדי סיווגים מהסוג הזה כדי לייצר לכל אחד תת מחלקה משלה. אז בחרנו לחלק את מנועי הסרוו לתתי מחלקות לפי היצרן.



שימוש עיקרי
רוב מנועי הסרוו שתפגשו עושים תנועה הדומה לתנועת מגב (וישר) של הרכב. במאפיינים של המנוע תמצאו את הזווית המקסימלית לתנועה זו. בדרך כלל באיזור ה-180 מעלות, כלומר אם נרכיב זרוע על ציר המנוע ונפנה את ה-0 מעלות כלפי מעלה, הזרוע תוכל לעשות תנועה של 90 מעלות שמאלה ו-90 מעלות ימינה. יש מנועים שמוגבלים לתנועה קטנה יותר ויש כאלה שיכולים לעשות גם 4 סיבובים, כלומר שליטה על 1440 מעלות!מה שמיוחד במנועי סרוו הוא זה שאתם שולטים על הזווית של הציר. נותנים פקודה לזוז לזווית הרצויה, והמנוע יגיע לשם בעצמו ויעצור, וגם ינסה להחזיק את הציר בזווית זו אם מופעל עליו כוח. במאפיינים של מנוע סרוו תמצאו את כוח האחזקה ומהירות הסיבוב.
את מנועי הסרוו אפשר למצוא היום בהרבה מאוד מקומות בפרוייקטים שונים, שליטה על כנפונים של טיסן, כיוון הגלגלים במכונית על שלט רחוק, הרמה של דגלון בתיבת הדואר, פתיחה וסגירת זרוע של מנעול… כל מה שדורש תנועה זוויתית בה צריך לשלוט על הזווית, או תנועה קווית לא גדולה, אותה אפשר לקבל בקלות ע"י זרוע המחובר לציר המנוע שדוחף ומושך משהו.
חוץ מתנועה זוויתית, יש מנועי סרוו הפועלים בדומה למנוע DC רגיל ומבצעים סיבוב רציף של הציר. יש דגמים שמגיעים בצורה זו מהיצרן, אבל ברוב המקרים, אפשר לפתוח את הדגם הזוויתי של המנוע ולעשות בו שינויים כדי להגיע למצב עבודה זה (לרוב אי אפשר יהיה להחזיר למצב פעולה הקודם) ויש כאלה שאפשר לשנות את שיטת העבודה ע"י תכנות בעזרת מעגל מיוחד. נרחיב על שיטת עבודה זו בהמשך.
צורת עבודה
אז איך עובד מנוע סרוו? מה קורה בתוך המארז הקטן?בתוך מנוע סרוו יש מנוע DC קטן, עם גלגלי שיניים כדי להגביר את הכוח ולהוריד מהירות. אחד המאפיינים של מנוע סרוו זה חומר ממנו עשויים גלגלי השיניים. הפשוטים ביותר עשויים מפלסטיק והיקרים ביותר עשויים מטיטניום (Titanium). אם נפעיל על המנוע עומס יותר גבוה ממה שמותר והמנוע יפסיק לפעול בצורה תקינה, רוב הסיכויים שמה שנשבר הם גלגלי השיניים, לכן לחומר הגלגלים תהיה השלכה ישירה לכוח שהמנוע יכול להחזיק. חלק מהיצרנים אף מוכרים גלגלי שיניים להחלפה כי התופעה של השבירה שלהם כל כך נפוצה.




אחד מהשלבים האחרונים של גלגל השיניים מחובר גם לפוטנציומטר סיבובי (נגד משתנה) שמספק לבקר המנוע, שגם הוא חלק מהמנוע, את הזווית הנוכחית של הציר. כך הבקר יודע להגיע לזווית הרצויה ולשמור על מיקום זה גם אם מופעל כח שמזיז את הציר מהמקום.
מה ששולט על המנוע הוא בקר פנימי. במאפיינים של מנוע סרוו תוכלו למצוא אם המנוע הוא אנלוגי או דיגיטלי. הכוונה היא למעגל הבקרה. במעגל אנלוגי הרכיבים משווים בין המתח שמגיע מהפוטנציומטר לבין המתח שמייצג את המיקום הרצוי ואם יש סטיה, היא מתורגמת למתח המסופק למנוע שמסתובב ומתקן את הזווית של הציר וגם של הפוטציאומטר המחובר אליו. במנוע דיגיטלי המתח מהפוטנציומטר עובר המרה לייצוג דיגיטלי וההשוואה מתבצעת ע"י מיקרובקר. ואם יש כבר מיקרובקר, אז מנועים דיגיטליים משוכללים יותר מאפשרים רמה מסויימת של תכנות, כוונון רגישות, הגבלת זווית תנועה, שליטה על התאוצה והאטה, תקשורת בצורה שונה וכו'.
הבקרה המתמדת הזו נקראת בקרה בחוג סגור, כל שינוי בחיישן (פוטנציומטר) יגרום לסיבוב המנוע לכיוון של נקודת האיזון של המערכת.
באתר תמצאו גם מנועים שבתאור שלהם יהיה רשום "סיבוב רציף". במנועים כאלה פעולת הפוטנציומטר לא קיימת, כך שאתם לא שולטים על הזווית, אלא על מהירות הסיבוב. מנועים כאלה מצויינים לבניית רובוטים קטנים בגלל הגודל הקטן, בקר מובנה והשליטה הקלה על המנועים.
המנועים עם סיבוב רציף שנמכרים באתר מגיעים כך מהיצרן, אבל הרבה מאוד מהמנועים הזוויתיים אפשר להמיר למנוע רציף ע"י ניתוק הפוטנציומטר ולפעמים גם שבירת חלק מהציר שמונע ממנו פיזית לבצע סיבוב מלא. תוכלו למצוא על כך מדריכים באינטרנט.
חלק מהמנועים הדיגיטליים המשוכללים מאפשרים לשנות את מצב העבודה בין עבודה זוויתית לרציפה בעזרת כרטיס תכנות מיוחד.
אספקת מתח ושליטה
השליטה על מנוע סרוו מאוד פשוטה בהשוואה למנועים מסוג אחר. צריך לחבר מתח הדרוש ולספק פולסים הדומים לאות PWM המציינים את הזווית אליה נרצה לסובב את הציר.למנועים הנפוצים מתח האספקה יהיה בין 4.8V ל-6V. מתח של 5V יהיה מצויין למנועים אלה. במפרט של מנועים גדולים ומשוכללים יותר תוכלו למצוא מתחים גבוהים יותר של 7.4V, 11.1V וגם 14.8V.
סיגנל הבקרה של מנועי סרוו הוא אות PWM בתדר קבוע, כאשר רוחב הפולס מציין את זווית התנועה. שימו לב שלא היחס בין המצבים HIGH ו-LOW של ה-PWM שולטים על זווית המנוע, אלא הרוחב האבסולוטי של הפולס במצב HIGH. יותר נכון יהיה להגיד שהפולס שולט על אחוז התנועה של המנוע ולא על הזווית.
בקר טיפוסי של מנוע סרוו מצפה לראות פולס לפחות כל 25mSec, כלומר 40 פעם בשניה. קצב העדכון הטיפוסי הוא 50 פעמים בשניה. יש מנועים שישמחו לקבל פולסים מהירים יותר כדי לעדכן את המיקום בצורה מדוייקת יותר, אבל יש כאלה שלא יסתדרו עם קצב עדכון מהיר מדי. קצב עדכון של 200 פעמים בשניה הוא לא חריג במיוחד בתחום זה.
רוחב פולס של 1.5mSec תמיד יציין את נקודת ה-0 של המנוע עם טווח "מת" (Deadband Width) של כמה מיקרושניות, נתון שבדרך כלל אפשר למצוא במפרט המנוע. שינויים של פולס בטווח זה לא יגרמו לתזוזה של המנוע, מה שעוזר למנוע רעידות במצב מנוחה. פולסים ברוחב בין 1mSec ל-2mSec יגדירו עד כמה הציר יסתובב לכיוון אחד או השני. קראנו לזה "אחוז תנועה" כי מנוע עם תנועה מקסימלית של 120 מעלות יעשה סיבוב של 60 מעלות כשהוא מקבל פולס של 1mSec והמנוע בעל טווח של 180 מעלות יעשה סיבוב של 90 מעלות כשהוא מקבל את אותו הפולס.
הטווח של 1-2mSec מגיע מהמקלטים של עולם הטיסנים, והבקרים בתוך מנועי הסרוו מוכוונים לתחום זה, אבל המבנה הפיזי של רוב המנועים מאפשר תנועה רחבה יותר ואספקה של פולסים קצרים וארוכים יותר, נניח בין 0.8 ל-1.2mSec, תסובב את הציר לזוויות רחבות יותר מהסטנדרט, אם המנוע מאפשר זאת. את האות ה"לא סטנדרטי" אפשר לייצר בעזרת מיקרובקר או מוצרים מיוחדים שדואגים להרחיב או להקטין את טווח התנועה של מנוע סרוו.
חשוב להדגיש שהמנוע תמיד ינסה להגיע לזווית שקבעתם במהירות המקסימלית (מהירות שאפשר למצוא במפרט בדרך כלל ביחידות של זמן לזווית, כלומר תוך כמה זמן המנוע יוכל להסתובב לזווית הרשומה. לדוגמה: 0.15sec/60°, מה שאומר שלמנוע יקח 0.15 שניות כדי לבצע סיבוב של 60 מעלות). אם אתם צריכים תנועה איטית וחלקה בין זוויות שונות, תצטרכו לשדר למנוע את הזווית הנכונה בכל עדכון שנשלח למנוע. לדוגמה, אם צריך לסובב את המנוע 90 מעלות תוך 3 שניות ומיקרובקר שלכם מעדכן את המנוע 50 פעם בשניה (שזה בסה"כ 150 עדכונים), אז בכל עדכון צריך לשדר זווית העולה ב-0.6 מעלות בכל פעם (0.6 מעלות כפול 150 שווה 90).
ציר המנוע
ציר של מנוע סרוו הוא לא משהו שתמצאו במנועים מסוג אחר וגם לא משהו שקל להתחבר אליו ללא אביזר מתאים. הציר נראה כמו גלגל שיניים קטן:
הציר יכול להיות עשוי מתכת או פלסטיק, בהתאם לחומר ממנו עשויים גלגלי השיניים של המנוע. למנועים קטנים יותר יש ציר קטן וצר יותר, למנועים גדולים יש ציר רחב ומאסיבי יותר. לאביזר שמתלבש על הציר גם יש שיניים התואמים לציר והוא מהודק אליו עם בורג. לפעמים ההלבשה של האביזר על הציר לא הולכת בקלות, במיוחד כשגם הציר וגם האביזר עשויים ממתכת.
בדרך כלל המנועים מגיעים עם כמה אביזרים בצורות שונות וברגים להידוק.


לצערנו יש בלגן בתחום המידות של הצירים. יצרנים מובילים כמו Hitec ו-Futaba החליטו לייצר צירים בגדלים וצורות שונות (קוטר, כמות השיניים והזווית של השיניים). לדוגמה, במנועים בגודל "סטנדרטי" ל-Hitec היה ציר של 24 שיניים ול-Futaba ציר של 25 שיניים. בשלב כלשהו Hitec יצרו מנועים עם ציר בעל 25 שיניים, אבל הזווית שלהם היתה שונה מזו של Futaba, כך שגם אם קניתם אביזר לציר בעל 25 שיניים, הוא לא התאים… נראה שהיצרנים הסיניים ורוב היצרנים האחרים בחרו בצד של Futaba ונראה שגם הדגמים האחרונים של Hitec כוללים את הצירים באותן המידות והצורות כמו של האחרים. שימו לב היטב אם האביזר שאתם קונים מתאים למנוע. באתר תוכלו למצוא תת מחלקה יעודית לאביזרים למנועי סרוו.



מנועי צעד
גם מנוע צעד עושה תנועה סיבובית, אבל לא רציפה, אלה כמו שהשם שלו מרמז - בצעדים. המבנה של המנוע מזכיר מבנה של מנוע Brushless, מגנט כרוטור וסלילים קבועים, וכמו שהמנוע Brushless פועל, כך גם במקרה של מנוע צעד צריך בקר מנוע ייעודי שיודע להפעיל את הסלילים בסדר מסוים כדי להניע את המנוע. בשונה ממנוע DC שתוכנן לתנועה סיבובית רציפה, מנוע צעד מתוכנן לביצוע תנועה סיבובית מבוקרת, בצעדים קטנים.
צורת עבודה
המנועים הפופולריים בתחום שלנו הם מסוג Bi-Polar, כאלה שיש להם 4 חוטים, כאשר כל זוג של חוטים מחובר לסליל נפרד, נקרא להם סליל A ו-B. בפועל בתוך המנוע יש הרבה סלילי A ו-B המסודרים לסירוגין. אספקה של מתח רק לסליל A ואחריה אספקה רק לסליל B יגרמו לרוטור לבצע צעד אחד. אחרי זה מספקים מתח שוב רק לסליל A והרוטור יעשה עוד צעד. כיוון המתח המסופק לסלילים יגדיר את כיוון הצעד.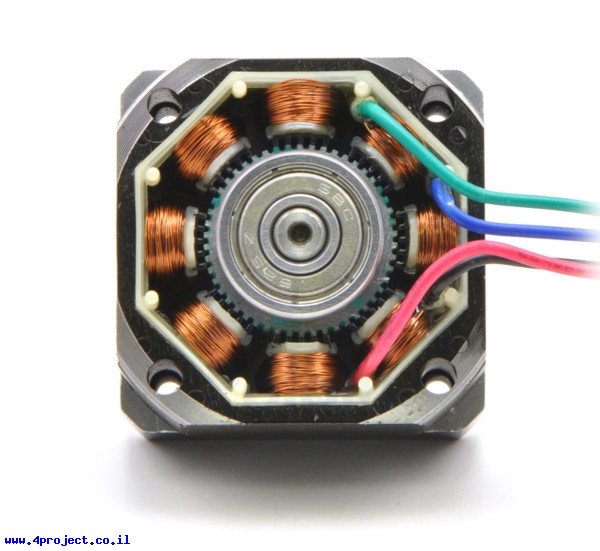
ישנם מנועי צעד עם תצורה אחרת של סלילים, בעלי 5 או 6 חוטים. סוג זה של מנועים נקרא Uni-Polar. בתצורה זו יש חוט נוסף היוצא מאמצע הסליל ומאפשר דיוק נוסף בצעדים של המנוע. למנועים Uni-Polar צריך בקר מנוע מיוחד שיודע לטפל בתצורת סלילים זו. אפשר להשתמש במנועי Uni-Polar באותה הצורה כמו שמשתמשים במנועים Bi-Polar אם לא משתמשים בחוט האמצעי של הסליל ומשתמשים רק בשני החוטים המפעילים את כל הסליל.
רוב המנועים הנמכרים באתר בנויים לבצע 200 צעדים לסיבוב שלם, כלומר כל צעד הוא 1.8 מעלות. כמות הצעדים לסיבוב או הזווית של כל צעד הוא נתון שתמצאו במפרט של כל מנוע. ישנם מנועים עם יותר צעדים לסיבוב, כלומר דיוק גבוה יותר ויש כאלה שצריכים לבצע פחות צעדים כדי להשלים את הסיבוב. יש דרך להגדיל את הדיוק (פי 128 בבקרים מסוימים) בעזרת שיטת ה-MicroStepping שנסביר עליה בהמשך.
אספקת מתח ושליטה
כמו שאתם מבינים, תפעול מנוע צעד קצת יותר מסובך מהפעלה של מנוע DC. כדי לתזמן את הפעלת הסלילים משתמשים בבקר מנוע צעד ייעודי. הבקרים האלה הרבה יותר חכמים מסתם לספק את המתח לסלילים, רובם מספקים הרבה תכונות נוספות, כמו הגבלת זרם, MicroStepping, תאוצה והאטה מבוקרת, ספירת הצעדים, זיהוי דילוג צעד ודברים שימושיים נוספים. נרחיב על כל אחד מהם.נתחיל קודם עם ההסבר על מתח וזרם המקסימליים שאפשר לספק למנוע צעד. את שני הערכים האלה תמצאו במפרט הטכני של המנוע והם נקבעים ע"י היצרן בהתאם לעובי החוטים מהם עשויים הסלילים שקובעים את ההתנגדות של הסליל. זרם גבוה יותר ממה שהיצרן הגדיר יכול לשרוף את החוטים ולהרוס את המנוע. המתח במפרט נגזר מהזרם המקסימלי וההתנגדות של הסליל (אנו ממליצים לקרוא את המדריך מתח, זרם, התנגדות וחוק אוהם להבנה נרחבת יותר). במקרים רבים המתח שמסופק למנועים גבוה פי כמה ממה שהיצרן מגדיר. מתח גבוה יותר גורם לשדה המגנטי סביב הסלילים להיבנות מהר יותר ובכך מקטין את זמן התגובה של המנוע, כלומר מגדיל את המהירות אליה אפשר יהיה להגיע. לא נדיר לראות מנוע המוגדר לעבודה ב-4V, מחובר למתח של 12V. כל זה עובד רק אם מגבילים את הזרם המקסימלי שיזרום דרך הסלילים לערך שהוגדר ע"י היצרן. הבקרים המודרניים יודעים לעשות זאת מצויין. על רוב הבקרים תמצאו פוטנציומטר קטן הקובע את הזרם המקסימלי, לבקרים משוכללים יותר אפשר יהיה להעביר את הזרם הרצוי דרך ערוץ התקשורת איתו, וכך אפילו לחסוך זרם כשהמנוע לא זז ולא מופעלים עליו כוחות (כשהמנוע לא זז, עדיין מסופק מתח לסלילים כדי להחזיק אותו באותו המקום). חשוב לשים לב גם לטמפרטורה של המנוע. אם אתם לא יכולים להחזיק את היד על המנוע במשך 10-20 שניות, כנראה שהגזמתם עם המתח או הזרם.
בפסקה של צורת העבודה הזכרנו את המצב בו סליל A מקבל מתח וסליל B לא, אחרי זה החלפת מצב שבו סליל B מקבל מתח וסליל A לא. זוהי שיטת העבודה ה"טבעית" יותר של המנוע ובמצב זה המנוע מבצע צעד מלא. תחשבו מה יקרה אם סליל A ו-B יקבלו את אותו המתח יחד… סביב שני הסלילים יווצר שדה מגנטי זהה, הרוטור לא יבצע צעד מלא, אלא יעצור איפה שהוא בין הסלילים, כלומר יעשה חצי צעד! ומה אם סליל A יקבל 25% מהמתח וסליל B יקבל 75%? הרוטור יעצור איפה שהוא ביניהם, אבל הפעם קרוב יותר ל-B, נכון? כי סביב סליל B יהיה שדה מגנטי חזק יותר שימשוך את המגנט הקבוע שבתוך הרוטור קצת יותר מהסליל A. זה בדיוק מה שקורה בשיטת עבודה הנקראת MicroStepping. רוב הבקרים המודרניים תומכים בשיטת עבודה זו, המאפשרת להגיע לדיוק הרבה יותר גבוה מ"צעד מלא" של המנוע. כמה יותר? פי 128 ואף יותר. אם מנוע רגיל עושה 200 צעדים לסיבוב, במצב של MicroStepping=128 המנוע יעשה 25,600 צעדים לסיבוב, שזה 0.0140625 מעלה לצעד אחד… שזה די מדוייק.
כמו כל דבר בחיים, הדיוק יבוא על חשבון משהו אחר ובמקרה הזה על חשבון הכוח של המנוע. בגרף הבא אפשר לראות שהמנוע יוכל לספק פחות מ-10% מהכוח שלו בהגדרה של MicroStepping=16.
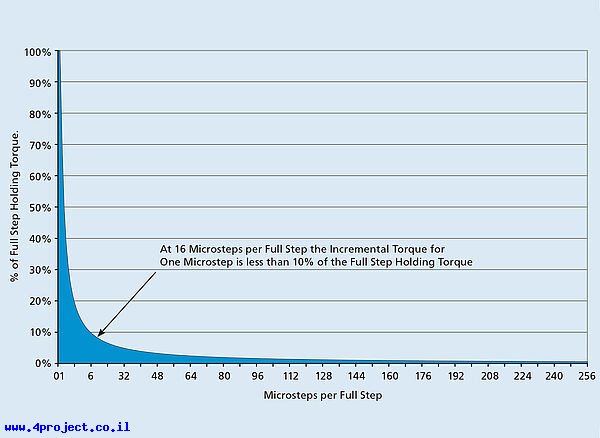
תמונה מהאתר www.faulhaber.com
וכשלמנוע אין מספיק כוח, כלומר הכוח שמופעל על הציר גדול יותר ממה שהמנוע יכול לספק, הוא יכול לפספס צעד. זה אומר שאתם מבקשים מהבקר לבצע צעד, הוא עושה את מה שהוא צריך לעשות עם המתחים של הסלילים, אבל הרוטור לא עובר לשלב הבא, אלא נשאר בזווית הנוכחית, אז הבקר מבצע עוד צעד ומבחינת הרוטור מתאים יותר להישאר באותו מקום ולא לזוז בכלל גם אם מפסיקים להפעיל עליו כוח (המתחים על הסלילים חוזרים לאותו המצב שהיה לפני התקיעה של הציר). כמה שמהירות הצעדים גבוהה יותר, כך יש יותר סיכוי שיהיה פספוס בצעדים.
יש בקרי מנוע מתוחכמים שיודעים לזהות את הפספוס לפי צורת המתח שמתפתח על קווי הסלילים (לא נכנס לפרטים, אבל כל שינוי בזרם על הסליל גורם למתח לקפוץ. תוכלו לקרוא על התופעה הנקראת Inrush Current). דרך נוספת לזהות פספוס צעד הוא לחבר מקודד לציר היציאה של המנוע ואחרי כל צעד לבדוק שגם המקודד התקדם באותה הזווית כמו המנוע.
ממשקים של רוב הבקרים בנויים כך שיש להם קו אחד המציין את הכיוון אליו אתם רוצים לבצע את הצעד וקו ה-Step עצמו. פולס בקו ה-Step יבצע צעד אחד בכיוון הרצוי, בהתאם להגדרות ה-MicroStepping. יש בקרים משוכללים הרבה יותר שמתקשרים בערוץ תקשורת שמאפשר להעביר פקודות של ממש, כך שאפשר "לדבר" עם הבקר ברמה גבוהה יותר ולבקש ממנו לבצע X צעדים בעצמו. בצורה זו מיקרובקר השולט על התהליך יוכל להיות עסוק בדברים אחרים מאשר להצעיד את המנוע. בקרים כאלה מאפשרים גם הגדרת פרופיל האצה והאטה כדי להקטין את העומסים ולהימנע ממצבים בהם המנועים מדלגים על הצעדים.
גודל פיזי
בעולם של מנועי צעד יש סטנדרטיזציה של גודל המנוע כדי שלתעשיה יהיה קל יותר להתאים את המנועים למכונות. נכון יותר יהיה להגיד שזו סטנדרטיזציה של החזית של המנוע (הצד ממנו יוצא הציר), זה גם הצד המשמש להרכבת המנוע. מאפיין זה נקרא NEMA. ראשי התיבות של NEMA הם US National Electrical Manufacturers Association, המספר שמגיע אחריו הוא הרוחב של המנוע. לדוגמה למנוע NEMA23 הרוחב יהיה 2.3", כלומר כ-58.4 מ"מ. זהו שרטוט מכני של מנוע NEMA23: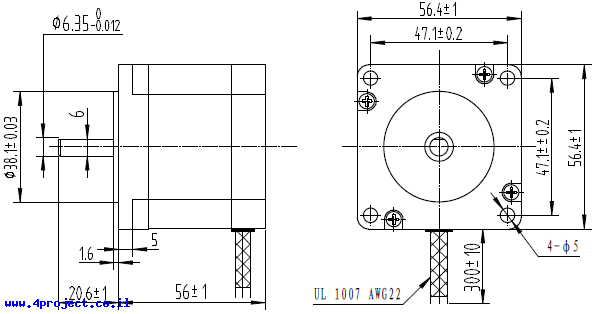
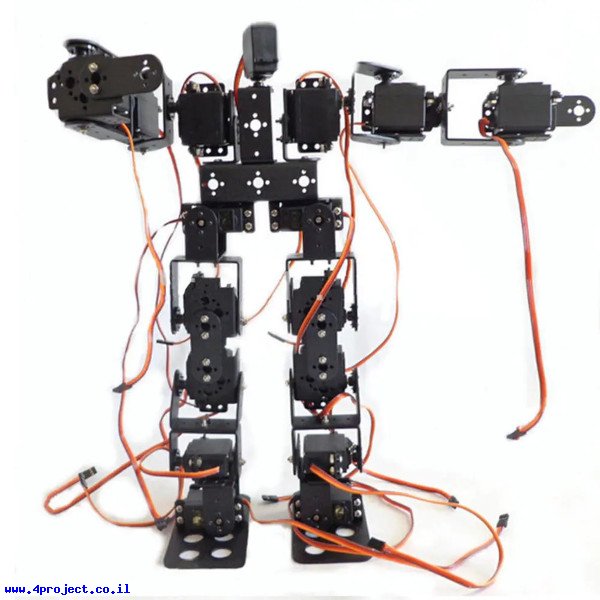
שימו לב שמאפיין זה לא אומר כלום על אורך המנוע שגם הוא יכול להיות שיקול חשוב האם מימדי המנוע יתאימו למכונה אליה הוא אמור להיות מחובר. כל המנועים האלה לדוגמה הם NEMA23:



חשוב לציין גם שמנוע עם דירוג NEMA גבוה יותר לא בהכרח יהיה חזק יותר. הוא יהיה רחב יותר, וכנראה חזק יותר ממנוע עם דירוג NEMA נמוך יותר אם לשניהם יש אותו אורך. כוח המנוע מצויין כמאפיין נפרד וחשוב לבדוק אותו ולהתאים לצרכים שלכם.
שימוש עיקרי
היעוד העיקרי של מנועי צעד הוא לבצע סיבוב מדוד ומבוקר ע"י צעדים. בשונה ממנוע סרוו, מנוע צעד לא מודע לזווית ההתחלתית של הציר, אבל אם נעשה 100 צעדים לכיוון אחד ואחרי זה 100 צעדים לכיוון השני, הציר תמיד יחזור למקום ממנו התחיל את התנועה. למכונות המופעלות ע"י מנועי צעד בדרך כלל יש תהליך איפוס כדי להביא את המנוע למיקום התחלתי ידוע וממנו אפשר יהיה להתחיל לספור את הצעדים כדי להגיע למיקום הרצוי.מנועי צעד אפשר למצוא במגוון רחב מאוד של התקנים. במכונות CNC, מדפסות תלת מימד, סורקים, מדפסות דיו וכו' התנועה הסיבובית של המנוע מומרת לתנועה קווית כדי להביא את הראש של המכונה למיקום הרצוי ע"י ספירת הצעדים מנקודת האיפוס. בכוננים הקשיחים של מחשב (HDD), כונני DVD והתקנים דומים נעשה שימוש במנועי צעד זעירים כדי לשלוט על מהירות הסיבוב וגם תמיד לדעת את הזווית של הדיסק שהמנוע מסובב.
למרות שמנוע צעד לא נועד לתנועה סיבובית כמו מנוע DC, עדיין אפשר למצוא אותם גם כמנועים המניעים רובוטים או מימושים אחרים הדורשים סיבוב מהיר. בדרך כלל לא תמצאו במפרט הטכני את המהירות המקסימלית אליו המנוע יוכל להגיע. מהירות זו לא תלויה רק במבנה הפיזי של המנוע, אלא גם בבקר המנוע שמספק את המתח/זרם ואפילו בעובי ואורך החוטים בין הבקר למנוע.
מנועים לינאריים
מנועים לינארים, כשמם הם, מבצעים תנועה לינארית (קווית). מנועים כאלה נקראים גם Actuators. כלומר במקום לסובב את הציר, מנוע לינארי מוציא ומכניס את הציר. המאפיינים העיקריים של מנועים כאלה הם האורך המקסימלי שהציר יוכל לצאת מגוף המנוע, מהירות התנועה וכח אותו המנוע יוכל להחזיק.מנועים כאלה משמשים בעיקר לדחיפה או הרמה של דברים. אפשר למצוא אותם לדוגמה במיטות מתכווננות. המנועים בדרך כלל די יקרים כי הם נועדו לתעשיה, עשויים מחומרים איכותיים ובנויים לטפל בעשרות ומאות קילוגרם.

צורת עבודה
המנועים בדרך כלל בנויים ממנוע שמסובב בורג הנעה (Lead Screw), שדוחף או מושך את ציר המנוע המחובר לאום הנוסע על בורג ההנעה. ישנם מנועים המבוססים על מנוע DC, וישנם כאלה שכוללים בקר פנימי ומתנהגים כמו מנוע סרוו. יש צורות ורמות איכות שונות של ברגי הנעה, כאלה שמבוססים על החלקה של אום העשוי מפליז על בורג פלדה ויש כאלה שכוללים מיסבים באום, מה שמשפר את התנועה ומאפשר להניע משקלים גדולים יותר.ערכה זו של מנוע לינארי המבוססת על רכיבי goBILDA יכולה להמחיש את המבנה הפנימי של מנוע לינארי:

לרוב בתוך המנוע יהיו שני מפסקים להגבלת התנוע כדי שהמנוע לא יהרוס את עצמו כשמגיע לקצוות.
לחלק מהמנועים יש גם חיישן מיקום שיאפשר להוציא את ציר המנוע לאורך הרצוי. החיישן הוא סוג של פוטנציומטר לינארי (נגד משתנה) המספק מתח שונה בהתאם למיקום הציר.
בסרטון זה תוכלו לראות השוואה בין הפעלת מנוע לינארי המבוסס על מנוע DC ועל מנוע סרוו. לקראת סוף הסרטון תוכלו לראות גם איך המנוע בנוי מבפנים.
מנועי רטט
מנועי רטט הם מנועים קטנים עם משקולת לא מאוזנת למרכז הסיבוב, כך שעם כל סיבוב המשקולת מושכת את המנוע לצדדים שונים ונוצרת ויברציה/רטט. מנוע דומה קיים בכל טלפון סלולרי, הוא זה שמודיע לכם על שיחה נכנסת או הודעה כשהטלפון במצב שקט.ישנם מנועים מאוד קטנים וסגורים כך שהם מתאימים להצמדה לגוף, תפירה לבגדים וכו':

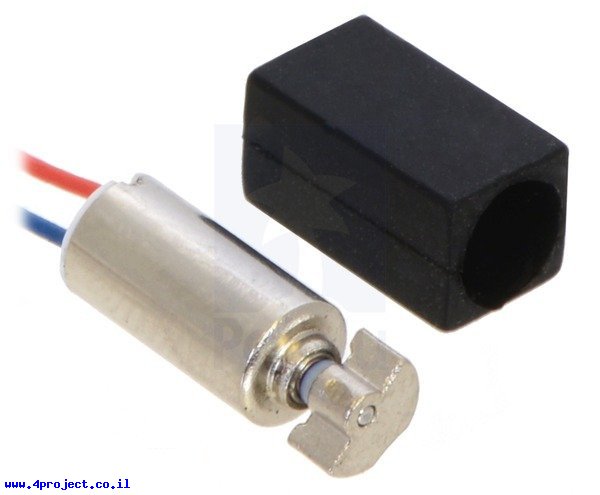
למנועים קצת יותר גדולים המשקולת בדרך כלל חשופה, כמו במנוע זה:
מנוע רטט שבתמונה הקודמת עדיין קטן מאוד. אם תרצו ממש להרעיד התקן כלשהו, תוכלו לקחת מנוע DC שמסתובב מהר ולחבר לו משקולת מוסטת מהמרכז.
צורת עבודה
העבודה עם מנועי רטט פשוטה מאוד - מספקים להם את המתח הדרוש והם מתחילים לקפץ. למרות שהמנוע קטן מאוד, עדיין כנראה שהזרם שהוא צורך יהיה גדול יותר ממה שמיקרובקר טיפוסי יוכל לספק. לכן יהיה צורך להשתמש בטרנזיסטור כדי למתג את הזרם. אבל ישנם גם בקרי מנוע רטט שנוצרו במיוחד להפעלה של מנועי רטט, בנוסף לאספקה של זרם הם יכולים גם לייצר תבניות שונות של רטט, כך שבעזרתם אפשר יהיה לייצר רטט שונה בלי שהמיקרובקר יהיה צריך לטפל במיתוג המנוע בזמנים צפופים.רכזות ומצמדים
לכל מנוע יש ציר שיוצא ממנו, צריך להתחבר לציר זה כדי להניע רכיבי מכניקה נוספים. כדי להתחבר לציר המנוע ישנם רכיבים שנקראים רכזות (Hubs) ומצמדים (Couplings). ההבדל בין שני סוגי הרכיבים הוא שרכזת תתחבר לציר המנוע ותעזור לכם לחבר אליו רכיב מכני אחר, בדרך כלל עם ברגים. מצמד נועד לחבר בין שני צירים, לדוגמה לחבר את ציר המנוע למוט פלדה כדי להאריך אותו וכדי להעביר את כוח הסיבוב למיקום אחר במערכת.רכזות
כאמור, רכזות נועדו לחבר ציר לרכיב אחר עם ברגים, לא רק ציר של מנוע, זה יכול להיות כל ציר או מוט. באתר תמצאו מגוון רחב של רכזות המותאמות לצירים בקוטר וצורה שונים (עגול, צורת D, משושה). חשוב לבחור רכזת המותאמת בדיוק לצורה וקוטר הציר של המנוע. רכזת ¼" (6.35 מ"מ) לא מתאימה לציר מנוע של 6 מ"מ.יש מגוון צורות להדק את הרכזת לציר, באתר תמצאו את שני הסוגים הבאים: עם בורג הידוק הלוחץ על הציר או הידוק/חיבוק של הרכיב עצמו סביב הציר.


צורת חיבור בעזרת בורג הידוק (Set Screw) מאפשרת לייצר רכיב יחסית קטן ומאוזן כדי למנוע רעידות במהירויות סיבוב גדולות. צורת חיבור זו מתאימה יותר לצירים שיש להם צד שטוח, כך שגם אם פועל על הרכזת כח גדול, הבורג לא יכול להחליק מהציר. לדוגמה, מוט פלדה בצורת D יהיה מצויין לרכיב המתחבר אליו בעזרת בורג הידוק:

צורת חיבור המתהדקת או מחבקת את הציר מתאימה לצירים עגולים (כי אין להם מקום בו בורג הידוק יוכל לתפוס), אבל גם לצירים אחרים. חלק מהרכזות, כמו שמופיע בתמונה למעלה, לא ממורכזות מה שיגרום לרעידות במהירויות סיבוב גבוהות.
ישנן רכזות שמשלבות את שני העולמות, גם מתהדקות סביב הציר וגם מאוזנות לסיבוב מהיר, אבל התשלום הוא בגודל ומשקל של הרכיב מכיוון שנדרשים ברגים משני צידי הרכזת:



מצמדים
את המצמדים אפשר לחלק לשתי קבוצות: מצמדים קשיחים ומצמדים גמישים. גם המצמדים יכולים להתחבר לציר עם בורג הידוק או בצורה שמחבקת את הציר.מצמדים קשיחים (Rigid Coupling), הם סוג של מתאם בין ציר בצורה/קוטר אחד לבין צורה/קוטר אחר וכמו שהשם שלהם מרמז, הם קשיחים, כמו צינור עם חור בקוטר שונה משני הצדדים (לא חייב להיות קוטר שונה, יש מצמדים שנועדו להאריך את הציר מאותו הסוג והגודל).



את המצמדים הגמישים (Flexible Coupling) קצת יותר קשה להבין. הם מבצעים את אותה הפעולה כמו המצמד הקשיח, אבל המבנה שלהם מאפשר גמישות זוויתית קטנה בין שני הצירים המחוברים. המצמדים הגמישים שיש לנו באתר הם הפופולריים ביותר והם נראים כמו קפיצים, אבל ישנם סוגים נוספים, אחד הנפוצים הוא סוג שכולל ריפוד פלסטי בין שני הצדדים, שמאפשר חופש תנועה קטן בכל הצירים.

אתם בטח חושבים למה צריכים את הגמישות הזו בכלל?
רכיבי מכניקה עשויים מחומרים קשיחים: פלדה, אלומיניום וכו'. אם שני הצירים המחוברים ע"י מצמד לא מותקנים בצורה אופקית בדיוק וממורכזת בצורה מושלמת, יפעלו על שני הצירים, על המיסבים שמחזיקים אותם, כוחות שלא אמורים להיות במערכת ויכולים לגרום לשחיקה או שבירה של חלק כלשהו.
מצמד גמיש מאפשר התקנה של הצירים בצורה לא הכי מושלמת, בזווית קטנה אחד כלפי השני, או מוסט בחלקיק מילימטר, ועדיין להעביר את כוח הסיבוב. כמובן שגם אם אתם משתמשים במצמד גמיש, רצוי לאזן וליישר את החיבורים עד כמה שאפשר.
מחזיקי מנוע
את גוף המנוע צריך להתקין לפרוייקט בצורה קשיחה כדי שהציר שלו יוכל להניע רכיבים אחרים. לכל סוג מנוע יש צורת התקנה שונה, נפרט על כל סוג בנפרד.מנועי צעד
התקנה של מנוע צעד לפרוייקט זו משימה יחסית קלה בזכות הסטנדרטיזציה של חזית המנוע, שיטה הנקראת NEMA. מה שאומר שאתם צריכים להתאים את מספר ה-NEMA של אביזר ההתקנה ל-NEMA של המנוע.התקנה של מנוע צעד מתבצעת ע"י 4 ברגים בפינות חזית המנוע. במנועים גדולים חורים אלה בדרך כלל ללא הברגה, כך שצריך בורג ארוך ואום לחיזוק, במנועים קטנים יותר החורים בתוך המנוע כוללים הברגה. חשוב לבדוק את סוג ואורך ההברגה כדי לא לנסות להכניס ברגים ארוכים מדי שעלולים לגרום נזק למנוע.


מחזיקי מנוע צעד מגיעים בדרך כלל בצורת "ר", צד אחד מורכב למשטח ואל הצד השני של ה-"ר" מורכב המנוע, או בצורת מתאם שטוח עם חורים המאפשרים הרכבה של המנוע על המתאם ואת המתאם לתבנית חורים אחרת.



למנועים גדולים וכבדים חשוב לבחור מחזיק מנוע שעשוי מחומר חזק ועבה, ורצוי שיהיה עם תומכים צדדיים כדי שה-"ר" יהיה חזק יותר:



מנועי DC
את מנועי DC בדרך כלל מרכיבים עם אביזר המחבק את המנוע, או את תיבת ההעברה שלו, או מחזיק מנוע DC המאפשר להבריג את החזית של תיבת העברה אל המתאם.



אם אתם משתמשים במחזיק מנוע המחבק אותו, חשוב שהחיבור יעשה כמה שיותר קרוב לציר.
אם אתם מבריגים את המנוע למתאם, חשוב לבחור ברגים בקוטר ואורך המתאים. במיוחד במנועים קטנים, ברגים ארוכים מדי יכולים להגיע עד לגלגל השיניים של הגיר ולהרוס אותם.
מנועי סרוו
לרוב מנועי סרוו יש בליטות בצידי גוף המנוע עם חורים לברגים. לרוב החורים פתוחים כמו בתמונה, אבל יש גם דגמים עם חורים סגורים. למנועים קטנים ממש בדרך כלל יש חור אחד בכל בליטה, למנועים גדולים יותר יש 2 מכל צד. זו תמונה של מנוע בגודל "סטנדרטי":
למנועים גדולים וחזקים בדרך כלל תמצאו בשקית האביזרים גומיות ו-Rivet (מסמרת?) לכל חור של המנוע:

הגומיות נועדו לרכך את הרעידות שהמנוע יכול לייצר במהלך הסיבוב. הגומיות יכולות להיות גם בצורה עגולה ולא כמו שמופיע בתמונה. את הגומיות מכניסים לתוך החורים ואת ה-Rivet מכניסים לחור הגומיה עם החלק הרחב כלפי מטה, שזה הצד שיוצמד למשטח ההתקנה והבורג ילחץ עליהם משני הצדדים.
למנועים קטנים כנראה שלא תמצאו את כל זה בשקית האביזרים כי הכוחות שפועלים שם כל כך קטנים שלא מצריכים ריכוך בהתקנה.
ומה לגבי המשטח? על מה להתקין את המנוע?
הכל תלוי בפרוייקט שלכם כמובן. אם אתם משתמשים ברכיבי מכניקה מסדרת goBILDA, תוכלו למצוא כמה פתרונות להתקנת מנוע סרוו:




בסדרת ה-goBILDA יש גם ערכות המאפשרות התקנה של המנוע שמספקות לו גם תמיכה מכנית נוספת לציר, כך שיוכל לעמוד בעומסים הרבה יותר גדולים:

יש גם ערכות עם תיבת העברה ביחס גלגלי שיניים שונה כדי לקבל יותר כוח מהמנוע (Servo Gearbox). בדרך כלל ערכות אלה מתאימות למנועי סרוו המבצעים כמה סיבובים, כך שלדוגמה עם מנוע Hitec HS-788HB שמסוגל לבצע 8 סיבובים וגלגלי שיניים עם יחס העברה של 1:9 תוכלו לקבל המון כוח וסיבוב של כ-314 מעלות:



ישנם מנועי סרוו שמוגדרים כמותאמים לרובוטיקה, שהציר שלו יוצא משני הצדדים, או ציר בצד אחד ובליטה עגולה בצד השני, מה שמאפשר הרכבה של מיסב כדי לתת נקודת חיבור נוספת. בדרך כלל מנועים כאלה מגיעים עם סוג של מסגרת אלומיניום המורכבת משני חלקים, אחד המתחבר לגוף המנוע והשני לציר משני הצדדים (או ציר ובליטה), מה שמקל לחבר את המנוע לרכיבים נוספים, או לפעמים אחד לשני כדי לייצר "מפרקים" של תנועת ידיים או רגליים לרובוט.

בזה סיימנו את המדריך המפרט את רוב המוצרים במחלקת המנועים באתר www.4project.co.il